Tuning an Extended Kalman Filter







Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
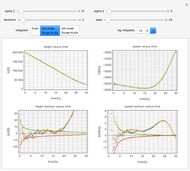
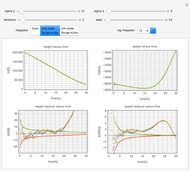
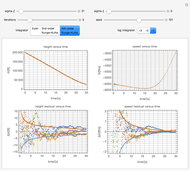
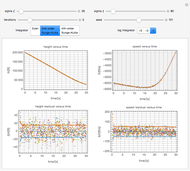
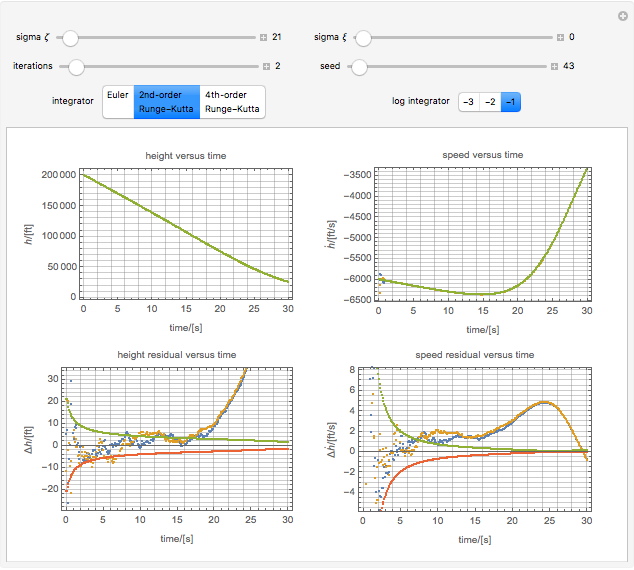
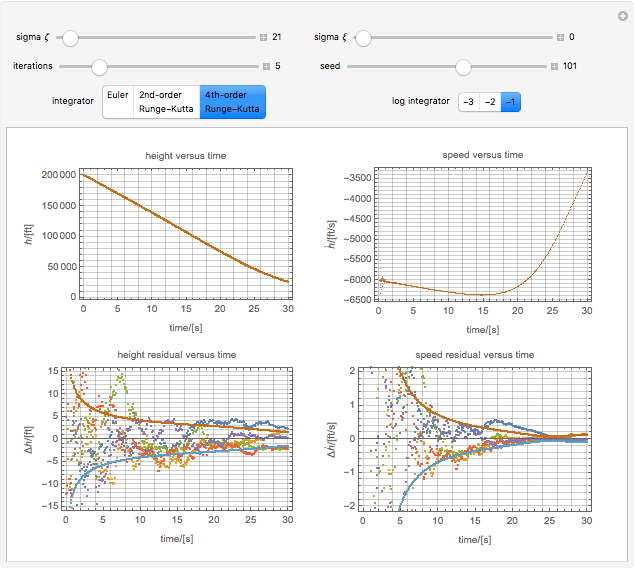
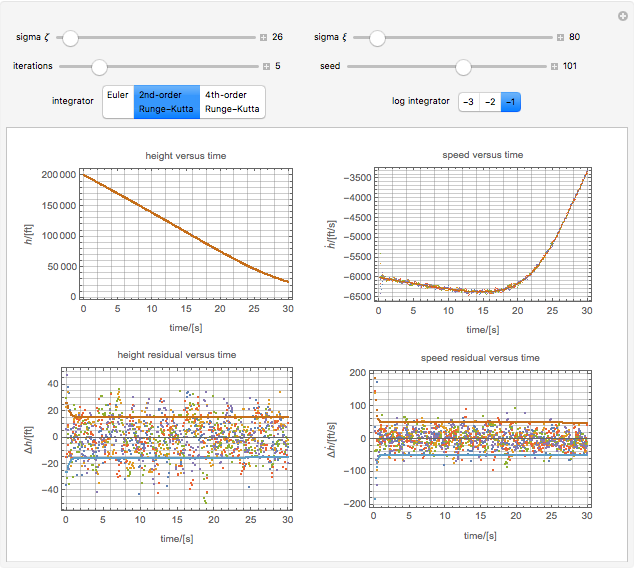
The Kalman filter is an algorithm that seeks to find the optimal representation for a series of observations by averaging over successive states, a type of Bayesian model. In its simplest form, it exploits the mathematical fact that the product of two Gaussians is another Gaussian.
[more]


Contributed by: Brian C. Beckman (May 2016)
Open content licensed under CC BY-NC-SA
Snapshots
Details
The example uses advanced functional programming over lazy streams to integrate in constant memory and to modularize the integrators and other components. The code has many reusable parts and is worthy of study independently of the application to Kalman filtering.
Reference
[1] P. Zarchan and H. Musoff, Fundamentals of Kalman Filtering: A Practical Approach, 4th ed., Reston, VA: American Institute of Aeronautics and Astronautics, 2015 Chapter 7. doi:10.2514/4.102776.
Permanent Citation
"Tuning an Extended Kalman Filter"
http://demonstrations.wolfram.com/TuningAnExtendedKalmanFilter/
Wolfram Demonstrations Project
Published: May 31 2016
 Tracking an Object in Space Using the Kalman Filter
Tracking an Object in Space Using the Kalman Filter
Oliver K. Ernst Trigonometric Fitting and Interpolation
Trigonometric Fitting and Interpolation
Bruce Atwood and Rikley Buckingham Frequency Spectrum of a Noisy Signal
Frequency Spectrum of a Noisy Signal
Jon McLoone Pi Filter
Pi Filter
Selwyn Hollis Analog-to-Discrete System Conversion Using Impulse Invariance
Analog-to-Discrete System Conversion Using Impulse Invariance
Nasser M. Abbasi XFT2D: A 2D Fast Fourier Transform
XFT2D: A 2D Fast Fourier Transform
Rafael G. Campos, J. Jesus Rico Melgoza, and Edgar Chavez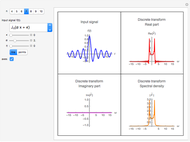 XFT: An Improved Fast Fourier Transform
XFT: An Improved Fast Fourier Transform
Rafael G. Campos, J. Jesus Rico Melgoza, and Edgar Chavez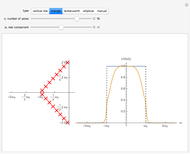 Lowpass Filter Design by Pole Placement
Lowpass Filter Design by Pole Placement
Aaron T. Becker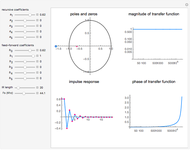 Digital IIR Filter Design Showing Poles and Zeros
Digital IIR Filter Design Showing Poles and Zeros
Hans Anderson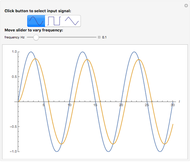 Response of Low-Pass RC Filter to Periodic Waveforms
Response of Low-Pass RC Filter to Periodic Waveforms
Mariusz Jankowski