End Effector Trajectory Tracking for Planar Linkage
Initializing live version





Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
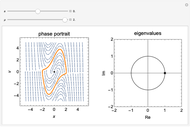
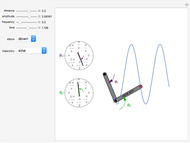
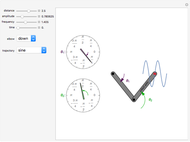
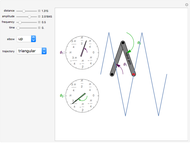
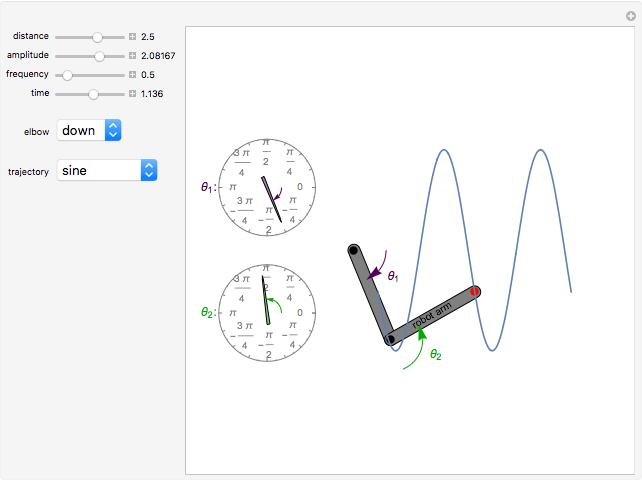
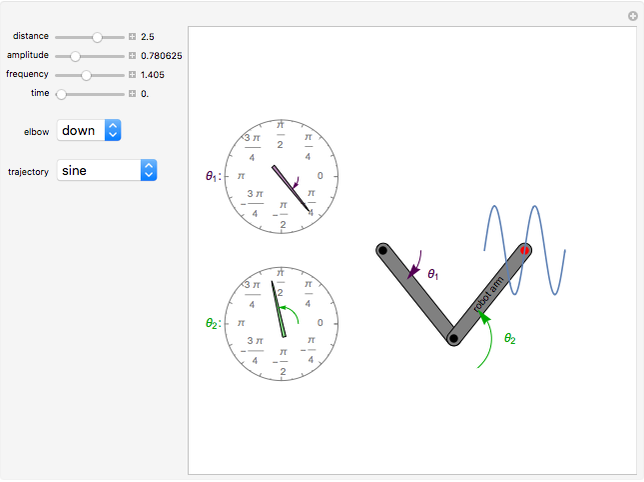
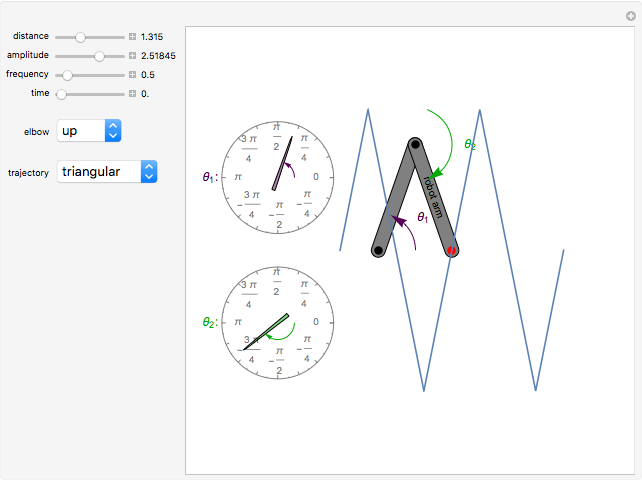
The end effector (red dot) of this two-link planar arm follows a time-shifting, predefined trajectory while moving in the vertical direction only. The following can be manipulated:
[more]

Contributed by: Tushar Mollik and Edmon Perkins (December 2019)
Open content licensed under CC BY-NC-SA
Details
Reference
[1] M. W. Spong, S. Hutchinson and M. Vidyasagar, Robot Modeling and Control, Hoboken, NJ: John Wiley and Sons, 2006.
Snapshots
Permanent Citation
Related Demonstrations
More by Author
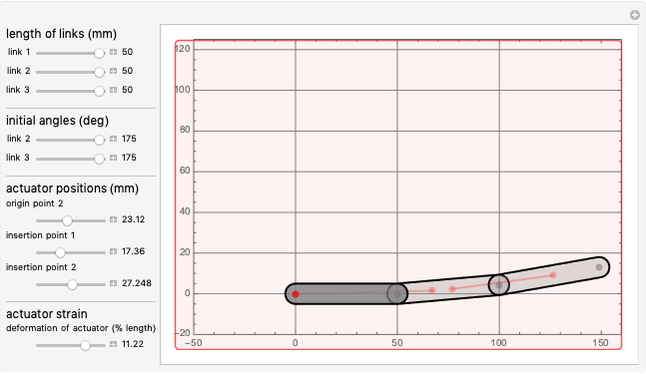 Effects of Deformation on Actuated Joints
Effects of Deformation on Actuated Joints
Scott Kennedy and Edmon Perkins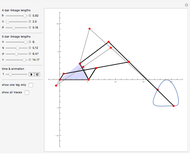 Walking Mechanism Using a Klann Linkage
Walking Mechanism Using a Klann Linkage
Erik Mahieu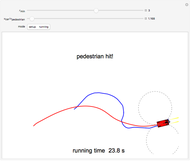 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia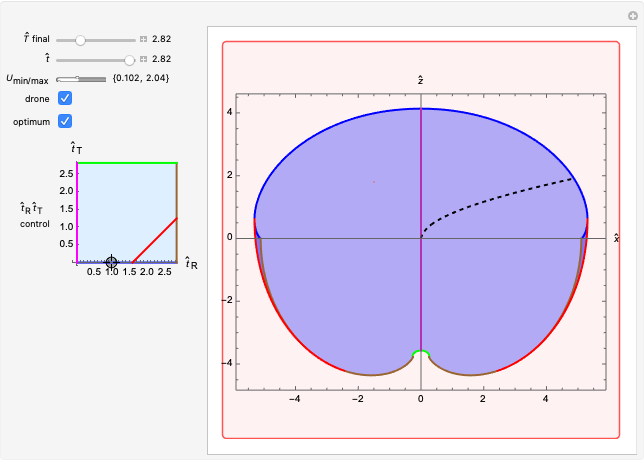 Reachable Set for a Drone
Reachable Set for a Drone
Mohammad Sultan and Aaron T. Becker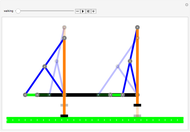 Chebyshev Walking Machine
Chebyshev Walking Machine
Erik Mahieu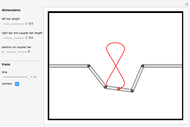 Watt's Lemniscoidal Linkage
Watt's Lemniscoidal Linkage
Erik Mahieu Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker and Shiva Shahrokhi Coupler Curve Atlas for the Four-Bar Linkage
Coupler Curve Atlas for the Four-Bar Linkage
Erik Mahieu Arm-Z Modular Manipulator
Arm-Z Modular Manipulator
Machi Zawidzki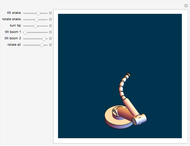 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai