Feedback Sensor Design for a Cantilevered Three-Layer Sandwich Beam

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
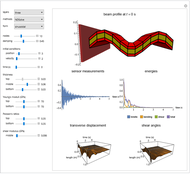
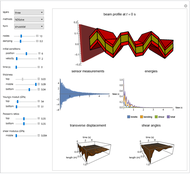
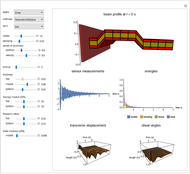
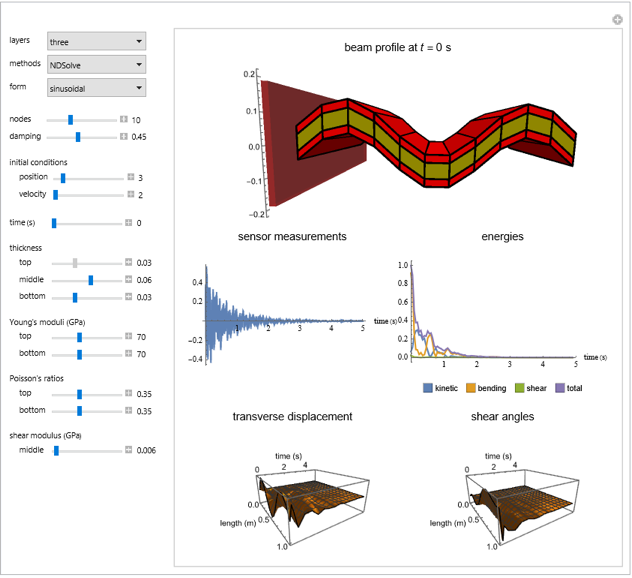
This Demonstration considers boundary-controlled vibrations on a cantilevered three-layer sandwich beam, consisting of a viscoelastic middle layer sandwiched (and perfectly bonded) between two outer elastic/piezoelectric layers. Outer and middle layers are modeled by the Euler–Bernoulli and the Mindlin–Timoshenko small displacement assumptions, respectively [1]. The outer layers are resistive to transverse shear of the filaments, while the middle viscoelastic layer allows transverse shear. Therefore, the only coupling across the layers is due to the shear of the middle viscoelastic layer. The layers, even though bonded, can move longitudinally during the motion. The sensor data with the measurements of the tip velocity of the beam is fed back to the actuator controlling the transverse shear on the boundary. The suppression of vibrations is achieved with this setup of the closed-loop system.
[more]




















Contributed by: Ahmet Kaan Aydin, Matthew Poynter and Ahmet Özkan Özer (January 2023)
Open content licensed under CC BY-NC-SA
Snapshots



Details
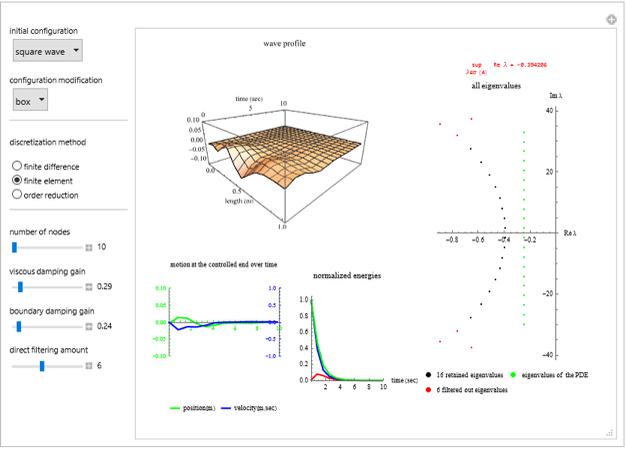
The PDE model (1) is approximated by the so-called Order-Reduced Finite Differences. Let the mesh parameter be  , where
, where  is the number of nodes in the uniform discretization in space variable
is the number of nodes in the uniform discretization in space variable  , and
, and  is taken to be 1 for simplicity. Now, the nodes of the discretization are
is taken to be 1 for simplicity. Now, the nodes of the discretization are
 .
.
Due to the second order boundary conditions, two fictitious points  ,
,  are also introduced.
are also introduced.
Letting  ,
,  describes the bending and shear angle on the beam, respectively; the reduced model of (1) is proposed as the following:
describes the bending and shear angle on the beam, respectively; the reduced model of (1) is proposed as the following:
(2) 
This model is shown to be uniformly observable with the sensor measurement  at the tip of the beam, and therefore, the solutions of (2) are exponentially stable, mimicking (1).
at the tip of the beam, and therefore, the solutions of (2) are exponentially stable, mimicking (1).
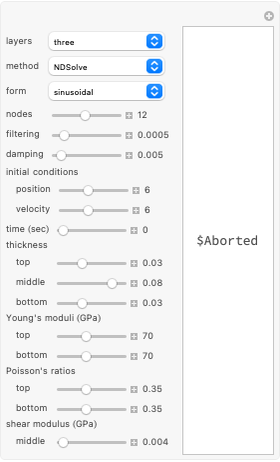
The initial conditions can be chosen in the form of sinusoidal, pinch, box, square wave, triangular wave or sawtooth wave with the magnitude of  . Materials constants and thicknesses of each layer can be determined individually. In order to better visualize the transverse displacements in the beam profile plot,
. Materials constants and thicknesses of each layer can be determined individually. In order to better visualize the transverse displacements in the beam profile plot,  and
and  are scaled up. The single-layer beam model (Euler–Bernoulli) is also shown, which is equivalent to (2) with
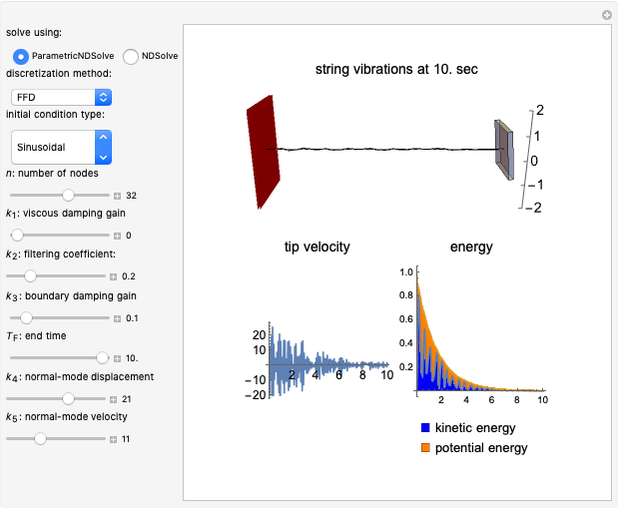
are scaled up. The single-layer beam model (Euler–Bernoulli) is also shown, which is equivalent to (2) with  [2]. The same filtering method is successfully implemented for the boundary-damped wave equation [3].
[2]. The same filtering method is successfully implemented for the boundary-damped wave equation [3].
This material is based upon work supported by the National Science Foundation under Cooperative Agreement No. 1849213. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
References
[1] A. Ö. Özer, "Dynamic and Electrostatic Modeling for a Piezoelectric Smart Composite and Related Stabilization Results," Evolution Equations and Control Theory, 7(4), 2018 pp. 639–668. doi:10.3934/eect.2018031.
[2] S. W. Hansen, "Several Related Models for Multilayer Sandwich Plates," Mathematical Models and Methods in Applied Sciences, 14(8), 2004 pp. 1103–1132. doi:10.1142/S0218202504003568.
[3] A. Ö. Özer and A. K. Aydin, "A Novel Sensor Design for a Cantilevered Mead–Marcus Type Sandwich Beam Model by the Order-Reduction Technique," to be submitted.
[4] A. K. Aydin, "Robust Sensor Design for the Novel Reduced Model of the Mead–Marcus Sandwich Beam Equation," M.Sc. thesis, Department of Mathematics, Western Kentucky University, Bowling Green, KY, 2022. digitalcommons.wku.edu/theses/3603.
[5] J. Liu and B. Z. Guo, "A Novel Semi-discrete Scheme Preserving Uniformly Exponential Stability for an Euler–Bernoulli Beam," Systems & Control Letters, 134(12), 2019 104518. doi:10.1016/j.sysconle.2019.104518.
[6] I. F. Bugariu, S. Micu and I. Roventa, "Approximation of the Controls for the Beam Equation with Vanishing Viscosity," Mathematics of Computation, 85, 2016 pp. 2259–2303. doi:10.1090/mcom/3064.
Permanent Citation
 Vibration Suppression on a Hinged Three-Layer Sandwich Beam
Vibration Suppression on a Hinged Three-Layer Sandwich Beam
Ahmet Kaan Aydin, Matthew Poynter and Ahmet Özkan Özer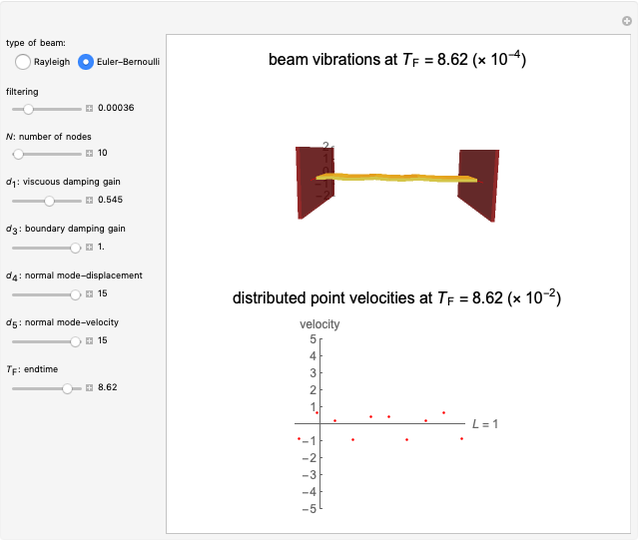 Boundary Stabilization of Euler-Bernoulli and Rayleigh Beam Vibrations
Boundary Stabilization of Euler-Bernoulli and Rayleigh Beam Vibrations
Donald Price, Emma Moore and Ahmet Özkan Özer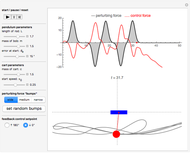 Automatic Feedback Control of a Pendulum-and-Cart System
Automatic Feedback Control of a Pendulum-and-Cart System
Erik Mahieu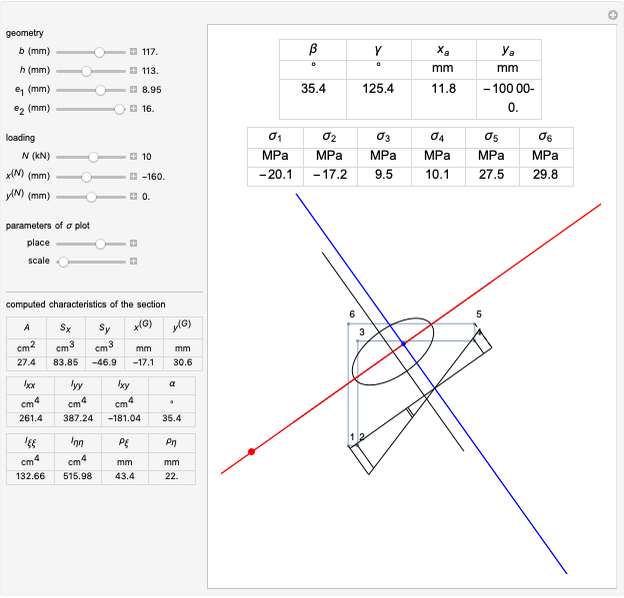 Bending and Stretching of an Elastic L-Beam
Bending and Stretching of an Elastic L-Beam
Maurizio Brocato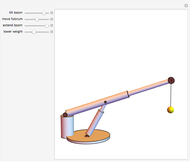 Crane Model
Crane Model
Sándor Kabai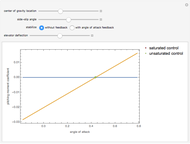 Static Longitudinal Stability of Fixed Wing Aircraft
Static Longitudinal Stability of Fixed Wing Aircraft
Suba Thomas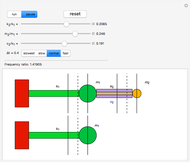 Tuned Mass Damper
Tuned Mass Damper
Nabil Fares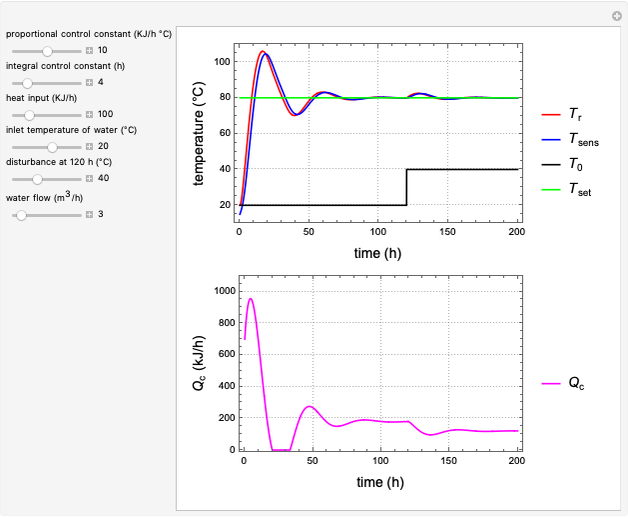 Feedback Control in a Stirred-Tank Reactor
Feedback Control in a Stirred-Tank Reactor
R. Ricardo Sánchez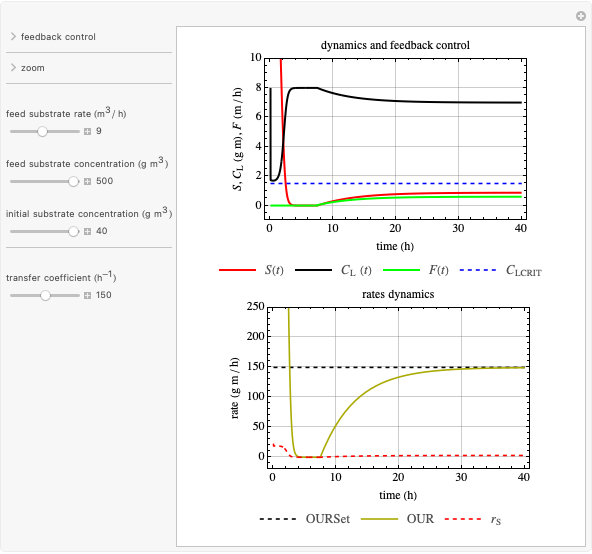 Feedback Control in an Activated Sludge Reactor
Feedback Control in an Activated Sludge Reactor
R. Ricardo Sánchez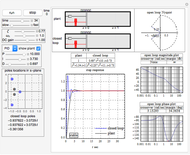 Simulation of Feedback Control System with Controller and Second-Order Plant
Simulation of Feedback Control System with Controller and Second-Order Plant
Nasser M. Abbasi
-
Vibration Suppression on a Hinged Three-Layer Sandwich Beam
Ahmet Kaan Aydin -
 Feedback Sensor Design for a Cantilevered Three-Layer Sandwich Beam
Feedback Sensor Design for a Cantilevered Three-Layer Sandwich Beam
Ahmet Kaan Aydin -
 Stabilization of the Wave Equation by Direct Fourier Filtering
Stabilization of the Wave Equation by Direct Fourier Filtering
Ahmet Kaan Aydin -
 Boundary-Feedback Control of Vibrations on a String with and without Filtering
Boundary-Feedback Control of Vibrations on a String with and without Filtering
Ahmet Kaan Aydin