Vibration Suppression on a Hinged Three-Layer Sandwich Beam

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
This Demonstration considers boundary controlled vibrations on a hinged three-layer sandwich beam, consisting of a viscoelastic middle layer sandwiched (and perfectly bonded) between two outer elastic/piezoelectric layers. Outer and middle layers are modeled by the Euler–Bernoulli and the Mindlin–Timoshenko small displacement assumptions, respectively [5]. The outer layers are resistant to transverse shear of the filaments, while the middle viscoelastic layer allows transverse shear. Therefore, the only coupling across the layers is due to the shear of the middle viscoelastic layer. The layers, even though bonded, can move longitudinally during the motion. To suppress vibration, a sensor/controller is placed at the tip of the beam.
[more]





















Contributed by: Ahmet Kaan Aydin, Matthew Poynter and Ahmet Özkan Özer (January 2023)
Open content licensed under CC BY-NC-SA
Snapshots



Details
The PDE model (1) is approximated by finite differences. Let the mesh parameter be  , where
, where  is the number of nodes in the uniform discretization in space variable
is the number of nodes in the uniform discretization in space variable  , with
, with  set equal to 1 for simplicity. Now, the nodes of the discretization are
set equal to 1 for simplicity. Now, the nodes of the discretization are  . To handle the second-order boundary conditions, two fictitious points
. To handle the second-order boundary conditions, two fictitious points  ,
,  are also introduced.
are also introduced.
Let  ,
,  describe the uniform bending of the overall sandwich beam and transverse shear angle of the middle layer on the beam, respectively. The following model reduction of (1) is proposed
describe the uniform bending of the overall sandwich beam and transverse shear angle of the middle layer on the beam, respectively. The following model reduction of (1) is proposed
where the viscosity term  , called the indirect filtering term corresponding to
, called the indirect filtering term corresponding to  with the filtering parameter
with the filtering parameter  is added to fix the discrepancy. The model with
is added to fix the discrepancy. The model with  is shown to be uniformly observable as
is shown to be uniformly observable as  with the sensor measurement
with the sensor measurement  , and therefore, the solutions of (2) are exponentially stable, mimicking (1) (see [1, 3, 7] and the references therein).
, and therefore, the solutions of (2) are exponentially stable, mimicking (1) (see [1, 3, 7] and the references therein).
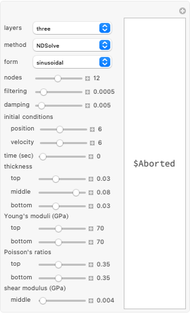
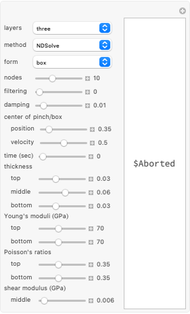
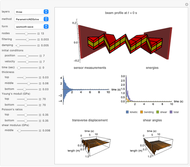
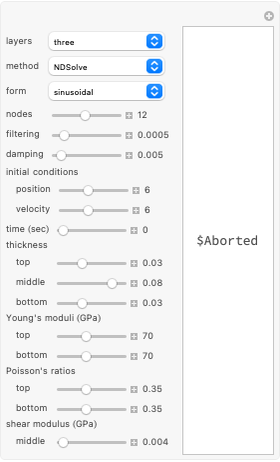
The initial conditions can be chosen in different forms with an amplitude of  . Material constants and thicknesses of each layer can be determined individually. In order to better visualize the transverse displacements in the beam profile plot,
. Material constants and thicknesses of each layer can be determined individually. In order to better visualize the transverse displacements in the beam profile plot,  is scaled up. The single-layer beam model is also shown, which is equivalent to (2) with
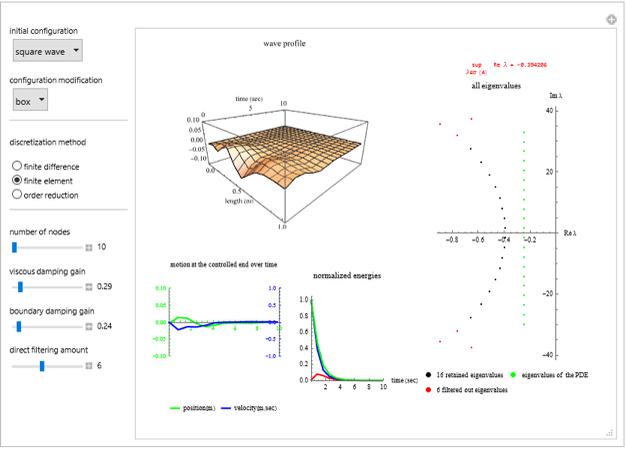
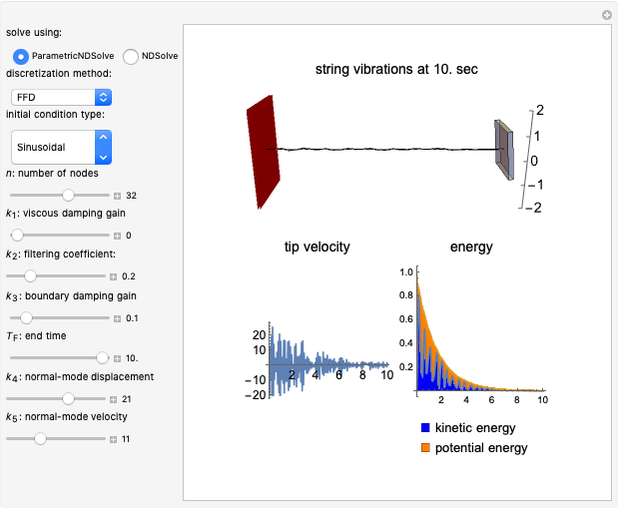
is scaled up. The single-layer beam model is also shown, which is equivalent to (2) with  (see [7]). As a side note, the same filtering method is successfully implemented for the boundary-damped wave equation (see the Related Links).
(see [7]). As a side note, the same filtering method is successfully implemented for the boundary-damped wave equation (see the Related Links).
This material is based upon work supported by the National Science Foundation under Cooperative Agreement No. 1849213.
References
[1] A. K. Aydin, "Robust Sensor Design for the Novel Reduced Model of the Mead-Marcus Sandwich Beam Equation," M.Sc. thesis, Department of Mathematics, Western Kentucky University, Bowling Green, KY, 2022. digitalcommons.wku.edu/theses/3603.
[2] A. K. Aydin, M. Poynter and A. Ö. Özer, "Feedback Sensor Design for a Cantilevered Three-Layer Sandwich Beam," Wolfram Demonstrations Project. (Dec 13, 2022) demonstrations.wolfram.com/FeedbackSensorDesignForACantileveredThreeLayerSandwichBeam.
[3] I. F. Bugariu, S. Micu and I. Roven\:0163a, "Approximation of the Controls for the Beam Equation with Vanishing Viscosity," Mathematics of Computation, 85, 2016 pp. 2259–2303. doi:10.1090/mcom/3064.
[4] S. W. Hansen, "Several Related Models for Multilayer Sandwich Plates," Mathematical Models and Methods in Applied Sciences, 14(8), 2004 pp. 1103–1132. doi:10.1142/S0218202504003568.
[5] D. J. Mead and S. Markus, "The Forced Vibration of a Three-Layer, Damped Sandwich Beam with Arbitrary Boundary Conditions," Journal of Sound and Vibration, 10(2), 1969 pp. 163–175. doi:10.1016/0022-460X(69)90193-X.
[6] A. Ö. Özer, "Dynamic and Electrostatic Modeling for a Piezoelectric Smart Composite and Related Stabilization Results," Evolution Equations and Control Theory, 7(4), 2018 pp. 639–668. doi:10.3934/eect.2018031.
[7] A. Ö. Özer and A. K. Aydin, "Uniform Boundary Observability of Filtered Finite Difference Approximations of a Mead–Marcus Sandwich Beam Equation with Only One Boundary Observation," forthcoming in 2022 IEEE 61st Conference on Decision and Control (CDC), Cancún, Mexico, 2022.
Permanent Citation
 Bending and Stretching of an Elastic L-Beam
Bending and Stretching of an Elastic L-Beam
Maurizio Brocato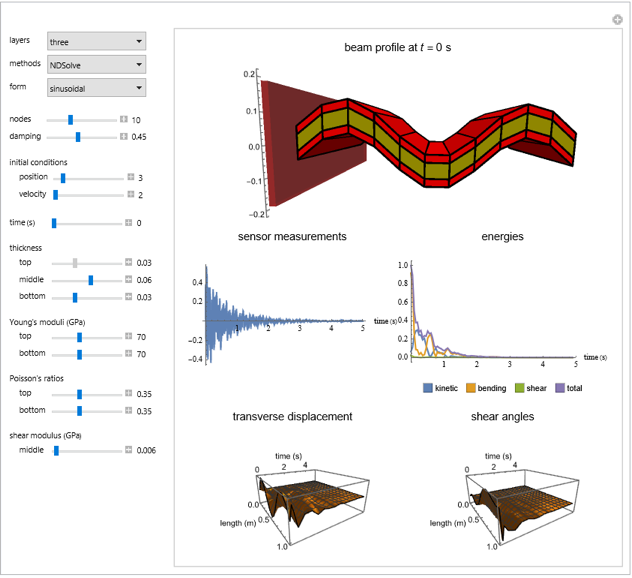 Feedback Sensor Design for a Cantilevered Three-Layer Sandwich Beam
Feedback Sensor Design for a Cantilevered Three-Layer Sandwich Beam
Ahmet Kaan Aydin, Matthew Poynter and Ahmet Özkan Özer Bending and Stretching of an Elastic U-Beam
Bending and Stretching of an Elastic U-Beam
Maurizio Brocato Mohr's Circle and Failure Criterion for Planar Stress States
Mohr's Circle and Failure Criterion for Planar Stress States
Felipe R. Amador V. Hinged Lining for a Tunnel
Hinged Lining for a Tunnel
Sándor Kabai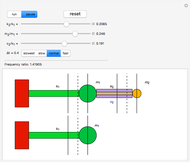 Tuned Mass Damper
Tuned Mass Damper
Nabil Fares Steady-State Temperature Profile of Two-Layer Pipe
Steady-State Temperature Profile of Two-Layer Pipe
Fredericka Brown and Sara McCaslin Boundary Stabilization of Euler-Bernoulli and Rayleigh Beam Vibrations
Boundary Stabilization of Euler-Bernoulli and Rayleigh Beam Vibrations
Donald Price, Emma Moore and Ahmet Özkan Özer Model for Earthquake on a Tall Building
Model for Earthquake on a Tall Building
Enrique Zeleny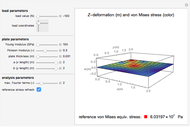 Navier Solution for a Singularly Loaded Kirchhoff Rectangular Plate
Navier Solution for a Singularly Loaded Kirchhoff Rectangular Plate
Jorge García Tíscar
-
 Vibration Suppression on a Hinged Three-Layer Sandwich Beam
Vibration Suppression on a Hinged Three-Layer Sandwich Beam
Ahmet Kaan Aydin -
Feedback Sensor Design for a Cantilevered Three-Layer Sandwich Beam
Ahmet Kaan Aydin -
 Stabilization of the Wave Equation by Direct Fourier Filtering
Stabilization of the Wave Equation by Direct Fourier Filtering
Ahmet Kaan Aydin -
 Boundary-Feedback Control of Vibrations on a String with and without Filtering
Boundary-Feedback Control of Vibrations on a String with and without Filtering
Ahmet Kaan Aydin