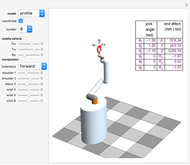
Forward Kinematics of Humanoid Robots





Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
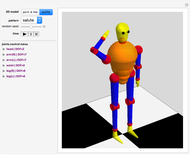
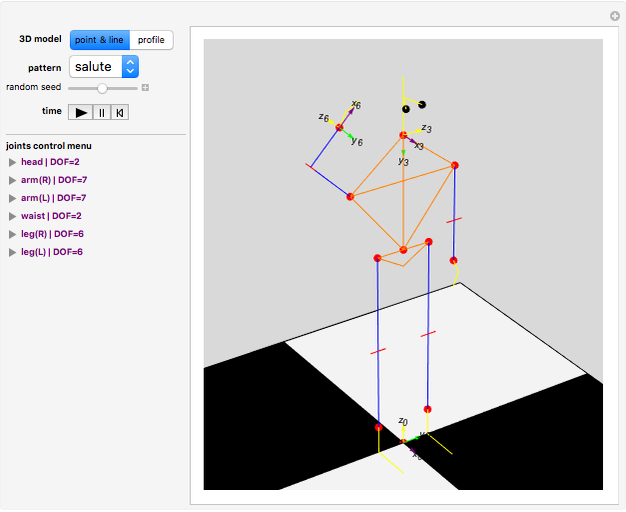
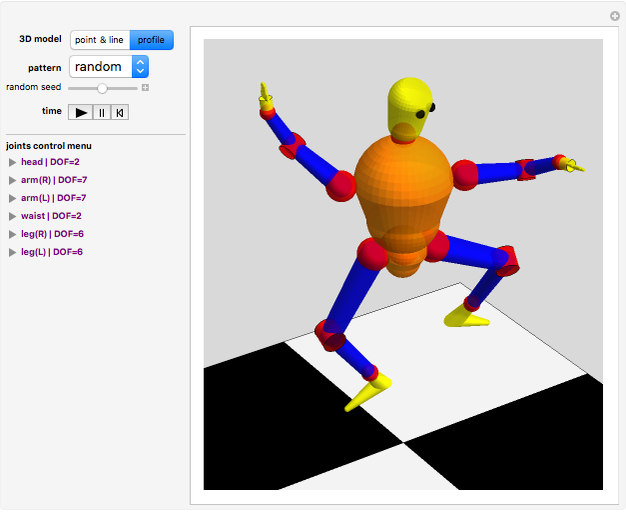
A humanoid robot is designed to replicate human characteristics such as height, shape, behavior, language, and cognition, so that it can function in human environments, interact with humans in daily life, or even replace humans at work. Many humanoid robots have been created in the past few decades by worldwide research, with examples such as the Honda ASIMO, AIST HRP, Aldebaran Nao, and so on. Intelligent-humanoid robotics is a cutting-edge challenge that will continue to play a central role in robotics research and applications in the twenty-first century.
[more]
Contributed by: Frederick Wu (September 2014)
Additional contributed by: Qixin Xu and Fan Wang
Open content licensed under CC BY-NC-SA
Snapshots
Details
This Demonstration was inspired by Professor Oussama Khatib's Introduction to Robotics Course, available free online through Stanford Engineering Everywhere (SEE).
References
[1] J. J. Craig, Introduction to Robotics: Mechanics and Control, 3rd ed., Upper Saddle River, NJ: Pearson/Prentice Hall, 2005 pp. 62–82.
[2] J. Denavit and R. S. Hartenberg, "A Kinematic Notation for Lower-Pair Mechanisms Based on Matrices," Journal of Applied Mechanics, 22(2), 1955 pp. 215–221.
[3] B. Siciliano and O. Khatib, Springer Handbook of Robotics, Berlin: Springer–Verlag, 2008.
Permanent Citation
"Forward Kinematics of Humanoid Robots"
http://demonstrations.wolfram.com/ForwardKinematicsOfHumanoidRobots/
Wolfram Demonstrations Project
Published: September 26 2014
 Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu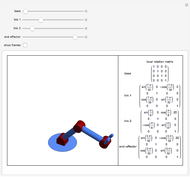 Forward Kinematics
Forward Kinematics
Rob Lockhart Kinematics of Biped Legs for Humanoid Robots
Kinematics of Biped Legs for Humanoid Robots
Frederick Wu Inverse Kinematics in Redundant Robot Manipulator
Inverse Kinematics in Redundant Robot Manipulator
André Carvalho Inverse Kinematics
Inverse Kinematics
Rob Lockhart Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Robot Builder
Robot Builder
Frank Liao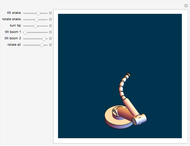 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai
-
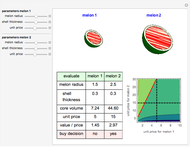 Buying Watermelons Intelligently
Buying Watermelons Intelligently
Frederick Wu -
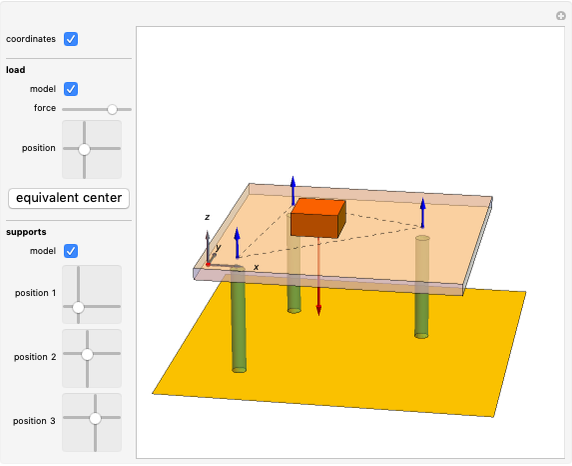 Static Equilibrium for a Plate with Support at Three Points
Static Equilibrium for a Plate with Support at Three Points
Frederick Wu -
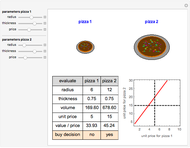 Evaluate Hot Pizza
Evaluate Hot Pizza
Frederick Wu -
 Rubik's Snake Puzzle
Rubik's Snake Puzzle
Frederick Wu -
 Mobile Robot with Single Manipulator
Mobile Robot with Single Manipulator
Frederick Wu -
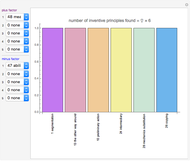 Multiple Input Parameters for TRIZ Matrix Application
Multiple Input Parameters for TRIZ Matrix Application
Frederick Wu -
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu -
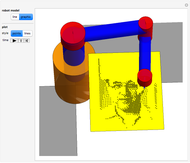 Trajectory Planning of Robot for Painting Art
Trajectory Planning of Robot for Painting Art
Frederick Wu -
 Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu -
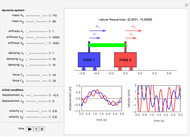 Spring-Mass-Damping System with Two Degrees of Freedom
Spring-Mass-Damping System with Two Degrees of Freedom
Frederick Wu -
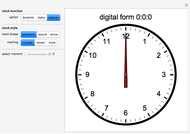 When Do the Three Hands of an Analog Clock Overlap?
When Do the Three Hands of an Analog Clock Overlap?
Frederick Wu -
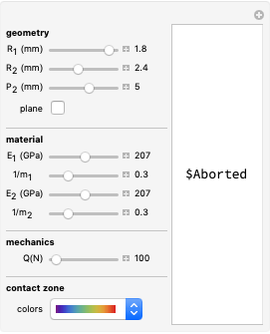 Hertzian Contact Stress
Hertzian Contact Stress
Frederick Wu -
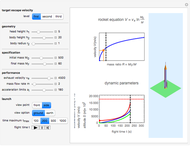 Launching a Rocket
Launching a Rocket
Frederick Wu -
Kinematics of Biped Legs for Humanoid Robots
Frederick Wu -
 Intersection of a Convex Polyhedron and a Plane
Intersection of a Convex Polyhedron and a Plane
Frederick Wu -
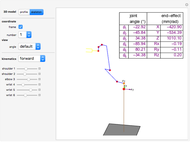
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu -
 Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Frederick Wu -
 Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu -
 Complex Addition of Harmonic Motions and the Phenomenon of Beats
Complex Addition of Harmonic Motions and the Phenomenon of Beats
Frederick Wu -
 Shortening the 29th Olympic Torch Tour
Shortening the 29th Olympic Torch Tour
Frederick Wu