High-Frequency Sonar Performance


Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
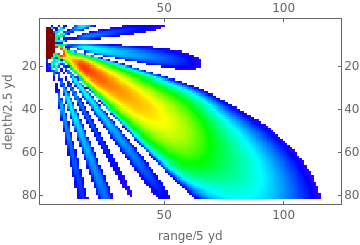
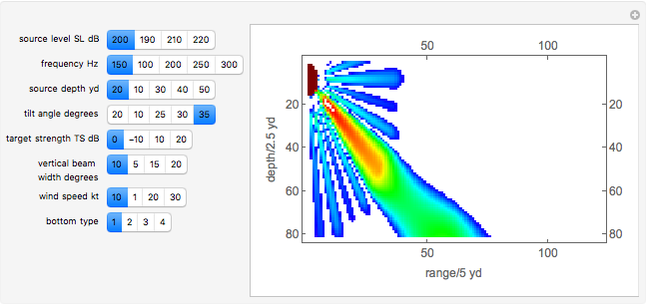
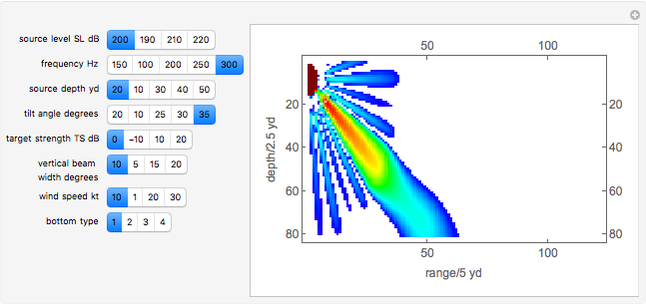
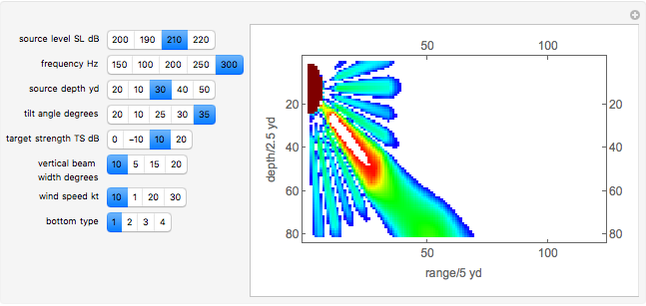
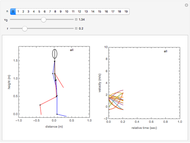
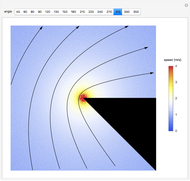
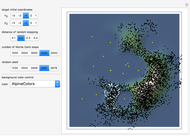
Active sonars that operate at frequencies above about 100 kHz are used in shallow water ocean environments to find objects located in the water column and on the ocean bottom. Sonar imaging capability improves at higher frequencies where wavelengths are smaller, but sonar detection range decreases due to increased sound absorption at higher frequencies. Additionally, sonar performance is limited by back-scattered sound from the ocean bottom, surface, and volume, as well as noise from wind and thermal effects. Sonar performance is measured in terms of the signal-to-noise ratio (SNR). High SNR corresponds to situations where the desirable target echo power exceeds the background reverberation and noise power. Sonar SNR is controlled by a variety of factors including the sonar source level, frequency, depth, tilt angle, and beam width. The sonar SNR is also influenced by target reflectivity, bottom type, and local wind conditions. This Demonstration shows those areas near the sonar where the SNR measured on a decibel scale is positive. Warmer colors correspond to higher SNR values.
Contributed by: Marshall Bradley (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots

Details
The intensity level of the sound radiated by a high-frequency sonar at distance  from the sonar and angle
from the sonar and angle  measured with respect to the sonar transmit-receive array axis is
measured with respect to the sonar transmit-receive array axis is
 ,
,
where  is the projector source intensity,
is the projector source intensity,  is the projector beam pattern on a power scale, and
is the projector beam pattern on a power scale, and  is absorption in dB per unit length. The received target echo from a scattering object located at distance from the sonar is
is absorption in dB per unit length. The received target echo from a scattering object located at distance from the sonar is
 ,
,
where  is the receive beam pattern and
is the receive beam pattern and  is the decibel (dB) target strength of the reflecting object.
is the decibel (dB) target strength of the reflecting object.
When the sonar projector-receiver array axis is pointed directly at the target, then  and both the projector and receiver beam pattern functions are unity. In this case the target echo level on a decibel scale reduces to
and both the projector and receiver beam pattern functions are unity. In this case the target echo level on a decibel scale reduces to
 ,
,
where  is the projector source level in dB at unit distance from the source and
is the projector source level in dB at unit distance from the source and  is the transmission loss. In isovelocity water, sound spreads spherically and the transmission loss is
is the transmission loss. In isovelocity water, sound spreads spherically and the transmission loss is  .
.
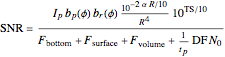
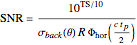
The signal-to-noise ratio for a high-frequency sonar that transmits a short continuous wave (CW) pulse and employs incoherent signal processing can be written in the form
 ,
,
where  is the sonar pulse length,
is the sonar pulse length,  is the directivity factor of the sonar transmit-receive array and
is the directivity factor of the sonar transmit-receive array and  is the ambient noise spectral intensity measured in units of power per Hz. The numerator in this equation is the signal intensity and the denominator the mask intensity. The mask is a measure of the amount of unwanted sound that is received by the sonar. The specific terms in the mask are the bottom, surface, and volume reverberation intensities and the receiver noise intensity. The combined effect of these four terms is often just referred to as the noise. Under normal circumstances, reliable detection can be achieved whenever
is the ambient noise spectral intensity measured in units of power per Hz. The numerator in this equation is the signal intensity and the denominator the mask intensity. The mask is a measure of the amount of unwanted sound that is received by the sonar. The specific terms in the mask are the bottom, surface, and volume reverberation intensities and the receiver noise intensity. The combined effect of these four terms is often just referred to as the noise. Under normal circumstances, reliable detection can be achieved whenever  (dB) exceeds about 12 dB.
(dB) exceeds about 12 dB.
When  is the dominant reverberation component, becomes
is the dominant reverberation component, becomes
 ,
,
where  is the bottom back-scatter function,
is the bottom back-scatter function,  is the speed of sound, and
is the speed of sound, and  is the effective azimuthal beam width of the sonar in radians. If the projector source level is sufficiently large, then the reverberation will dominate the noise and
is the effective azimuthal beam width of the sonar in radians. If the projector source level is sufficiently large, then the reverberation will dominate the noise and
 .
.
In this case, no further gains in performance can be achieved by using a larger source level. Active sonars are usually operated in a reverberation-limited mode in order to maximize sonar detection range.
References
[1] R. J. Urick, Principles of Underwater Sound, New York: McGraw–Hill, 1983.
[2] C. Clay and H. Medwin, Acoustical Oceanography, New York: John Wiley & Sons, 1977.
Permanent Citation
 Micro-Doppler Sonar Simulation
Micro-Doppler Sonar Simulation
Marshall Bradley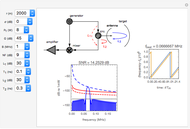 Frequency-Modulated Continuous-Wave (FMCW) Radar
Frequency-Modulated Continuous-Wave (FMCW) Radar
Marshall Bradley Performance of Reactive Acoustic Mufflers
Performance of Reactive Acoustic Mufflers
Joseph Blochberger Uncertainty in Sonar Performance Prediction
Uncertainty in Sonar Performance Prediction
Marshall Bradley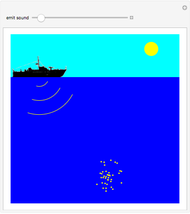 Sonar
Sonar
Enrique Zeleny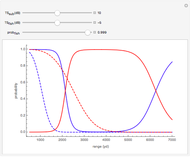 Bayesian Range Weighting for Sonar
Bayesian Range Weighting for Sonar
Marshall Bradley Path of Light through an Acoustic Wave
Path of Light through an Acoustic Wave
Brendon O'Leary Reflection and Transmission of Acoustic Waves
Reflection and Transmission of Acoustic Waves
David von Seggern Reverberations in Acoustic Layers
Reverberations in Acoustic Layers
David von Seggern (University of Nevada) Passive Sonar
Passive Sonar
Leo Singer
-
 Bayesian Distribution of Sample Mean
Bayesian Distribution of Sample Mean
Marshall Bradley -
 Fluid Flow around a Corner
Fluid Flow around a Corner
Marshall Bradley -
 Underwater Vehicle Pressure Signature
Underwater Vehicle Pressure Signature
Marshall Bradley -
 Extreme Value Forecasting
Extreme Value Forecasting
Marshall Bradley -
 Target Motion with the Metropolis-Hastings Algorithm
Target Motion with the Metropolis-Hastings Algorithm
Marshall Bradley -
 Noise Temperature of a Radar System
Noise Temperature of a Radar System
Marshall Bradley -
 High-Frequency Sonar Performance
High-Frequency Sonar Performance
Marshall Bradley -
 Atmospheric Radar Wave Absorption
Atmospheric Radar Wave Absorption
Marshall Bradley -
 Equine Motion
Equine Motion
Marshall Bradley -
Frequency-Modulated Continuous-Wave (FMCW) Radar
Marshall Bradley -
 Maximum Entropy Probability Density Functions
Maximum Entropy Probability Density Functions
Marshall Bradley -
Uncertainty in Sonar Performance Prediction
Marshall Bradley -
Micro-Doppler Sonar Simulation
Marshall Bradley -
 Human Walking Animation
Human Walking Animation
Marshall Bradley -
Bayesian Range Weighting for Sonar
Marshall Bradley