Inviscid Burgers's Equation




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
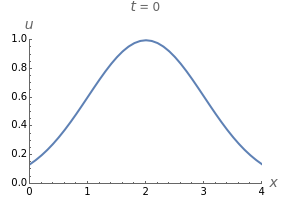
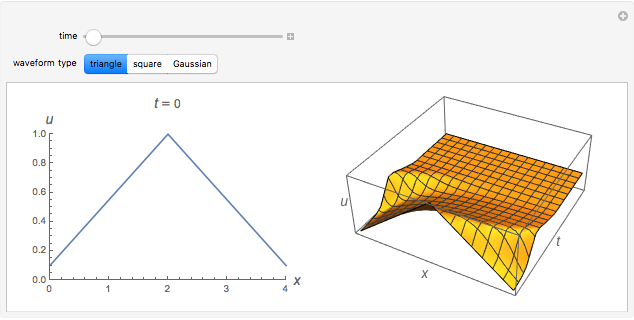
Burgers's equation is one of the simplest cases of a nonlinear, hyperbolic partial differential equation. It is useful as a test problem in computational fluid dynamics. The one-dimensional, inviscid (i.e., zero viscosity) form of the equation is given by
[more]



Contributed by: Garrett Neske (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots

Details
The inviscid Burgers's equation is a flux-conservative partial differential equation, and is thus amenable to finite-volume methods, which are often used for numerically solving nonlinear, hyperbolic partial differential equations. Hyperbolic problems are represented in the flux-conserving form
 ,
,
where  is the flux function for some conserved quantity
is the flux function for some conserved quantity  . The inviscid Burgers's equation is easily represented in this form if the flux function is considered to be
. The inviscid Burgers's equation is easily represented in this form if the flux function is considered to be  The finite-volume method takes the following form with forward-Euler time-stepping
The finite-volume method takes the following form with forward-Euler time-stepping
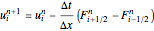 ,
,
where  is the space index,
is the space index,  is the time index,
is the time index,  is the flux at the right boundary enclosing the volume around point , and
is the flux at the right boundary enclosing the volume around point , and  is the flux at the left boundary enclosing the volume around point . There are several different finite-volume methods, which differ in their determination of and
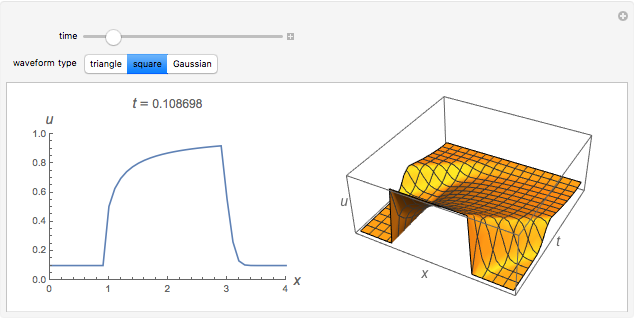
is the flux at the left boundary enclosing the volume around point . There are several different finite-volume methods, which differ in their determination of and  In this Demonstration, the Harten-Lax-van Leer (HLL) method is used because it is good at capturing shocks in an evolving waveform, which is a feature often found in solutions to Burgers's equation.
In this Demonstration, the Harten-Lax-van Leer (HLL) method is used because it is good at capturing shocks in an evolving waveform, which is a feature often found in solutions to Burgers's equation.
Reference: R. J. LeVeque, Finite Volume Methods for Hyperbolic Problems, Cambridge, UK: Cambridge University Press, 2002.
Permanent Citation
 Burgers Turbulence
Burgers Turbulence
Garrett Neske Potential Flow over an Airfoil Specified by Numerical Data File
Potential Flow over an Airfoil Specified by Numerical Data File
Richard L. Fearn Potential Flow over a NACA Four-Digit Airfoil
Potential Flow over a NACA Four-Digit Airfoil
Richard L. Fearn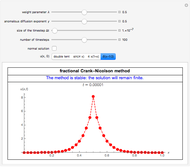 Numerical Solution of Some Fractional Diffusion Equations
Numerical Solution of Some Fractional Diffusion Equations
Santos Bravo Yuste Equation of Continuity
Equation of Continuity
Enrique Zeleny Solitons from the Korteweg-de Vries Equation
Solitons from the Korteweg-de Vries Equation
S. M. Blinder Bernoulli's Theorem
Bernoulli's Theorem
Enrique Zeleny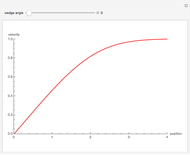 Numerical Solution of the Falkner-Skan Equation for Various Wedge Angles
Numerical Solution of the Falkner-Skan Equation for Various Wedge Angles
Housam Binous Fluid Pressure
Fluid Pressure
Anping Zeng Double-Sided Couette Flow
Double-Sided Couette Flow
David Gerhardinger
-
 Solving the Cable Equation
Solving the Cable Equation
Garrett Neske -
Burgers Turbulence
Garrett Neske -
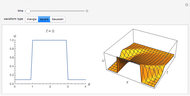 Inviscid Burgers's Equation
Inviscid Burgers's Equation
Garrett Neske -
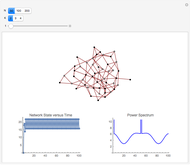 Boolean NK Networks
Boolean NK Networks
Garrett Neske -
 Neuronal Bursting
Neuronal Bursting
Garrett Neske -
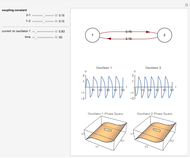 Desynchronization Dynamics of Two Coupled Oscillators
Desynchronization Dynamics of Two Coupled Oscillators
Garrett Neske -
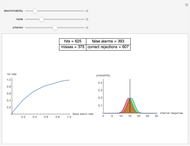 Signal Detection Theory
Signal Detection Theory
Garrett Neske -
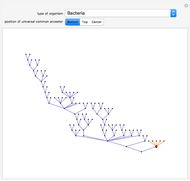 The Tree of Life
The Tree of Life
Garrett Neske -
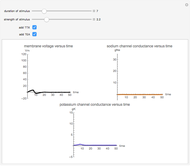 Neural Impulses: The Action Potential in Action
Neural Impulses: The Action Potential in Action
Garrett Neske