Moving Two Particles with Shared Control Inputs Using Wall Friction


Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
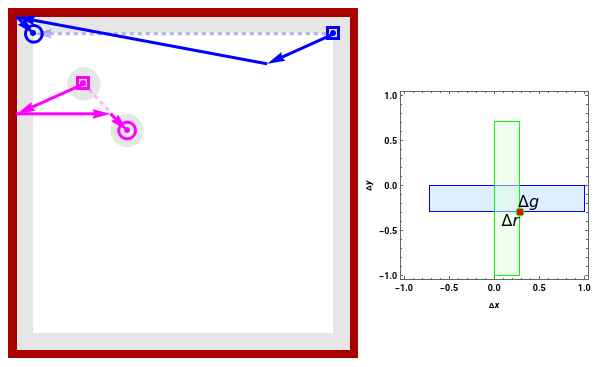
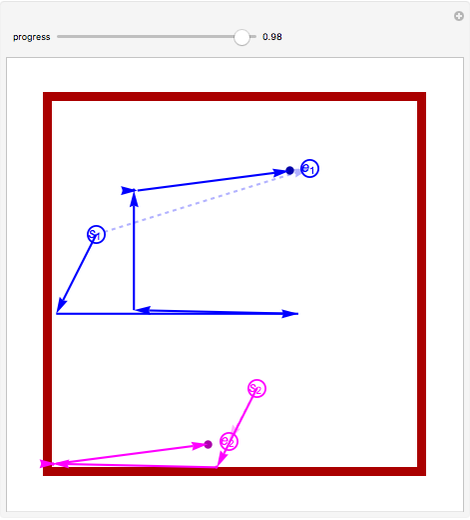
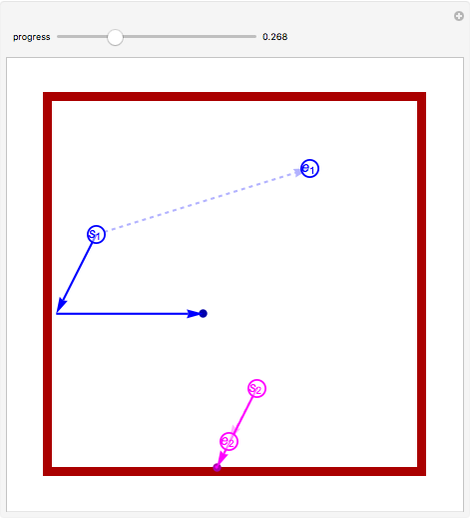
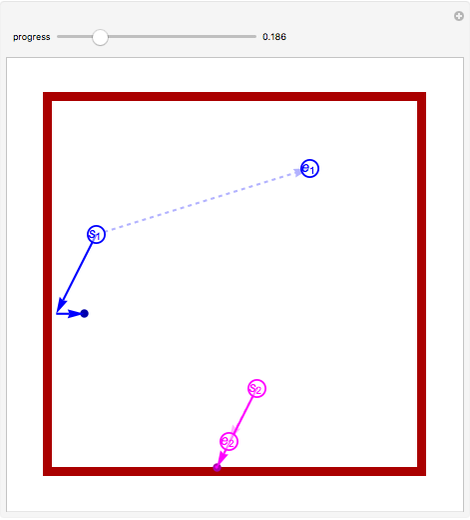
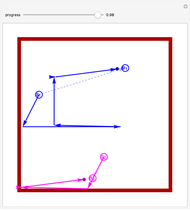
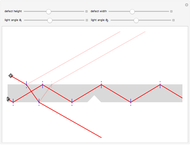
How can two particles in a two-dimensional workspace, steered by the same global control signal, be moved to arbitrary final positions? This is difficult because the control input is symmetrical. This Demonstration provides an algorithm to move the particles from starting positions (denoted by squares) to the desired final positions (denoted by circles) with the shortest path, making use of boundary interactions (dark red boundaries) to break this control symmetry. The parameter  controls how the particles approach the boundaries.
controls how the particles approach the boundaries.
Contributed by: Shiva Shahrokhi and Aaron T. Becker (November 2015)
Open content licensed under CC BY-NC-SA
Snapshots
Details
There are many applications for large swarms of tiny robots in robotics, biology and chemistry. These robots often lack onboard computation, actuation and communication capabilities. Instead, these “robots” are particles carrying some payload, and the particle swarm is controlled by a shared, global control input, such as a uniform magnetic gradient or electric field. In previous work, we showed that the two-dimensional position of each particle in such a swarm is controllable if the workspace contains a single obstacle the size of one particle.
Requiring a small rigid obstacle suspended in the middle of the workspace is a strong constraint, especially in three dimensions. This Demonstration relaxes that constraint and provides a position control algorithm that requires interactions only with the boundaries. Both in vivo and artificial environments often have boundaries. We assume that particles in contact with the boundaries have zero velocity if the global control input pushes the particle into the wall. This Demonstration provides a shortest-path algorithm for positioning a two-particle swarm.
The solution is a best-first search algorithm that maintains a list of possible paths (moves) sorted according to an admissible heuristic on path length. The algorithm works by expanding the path with the shortest estimated length. Expanding a path means either moving directly to the goal or pushing one robot to a wall and adjusting the relative position of the other robot. As soon as the goal is reached, the algorithm returns this shortest path.
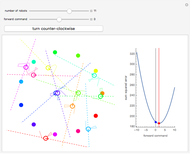
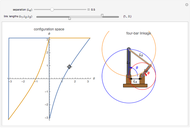
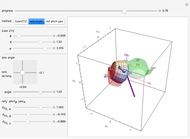
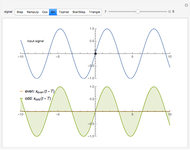
Both the robots and their paths are shown on the left plot, while the right plot shows either the  configuration space or the moves and their distances. The configuration is defined as the difference between the positions of robot 1 and robot 2. The red square represents the starting
configuration space or the moves and their distances. The configuration is defined as the difference between the positions of robot 1 and robot 2. The red square represents the starting  and
and  , and the green circle represents the goal and . The green rectangle represents and configurations reachable in one move by first colliding with a horizontal wall. The blue rectangle represents and configurations reachable in one move by first colliding with a vertical wall.
, and the green circle represents the goal and . The green rectangle represents and configurations reachable in one move by first colliding with a horizontal wall. The blue rectangle represents and configurations reachable in one move by first colliding with a vertical wall.
References
[1] A. Becker, G. Habibi, J. Werfel, M. Rubenstein and J. McLurkin, “Massive Uniform Manipulation: Controlling Large Populations of Simple Robots with a Common Input Signal,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan: IEEE, 2013 pp. 520–527. doi: 10.1109/IROS.2013.6696401.
[2] S. Shahrokhi, A. Mahadev and A. Becker, "Algorithms for Shaping a Particle Swarm with a Shared Input Using Non-Slip Wall Contacts," in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), forthcoming.
Permanent Citation
 Ensemble Control of Robots with Unicycle Kinematics
Ensemble Control of Robots with Unicycle Kinematics
Aaron Becker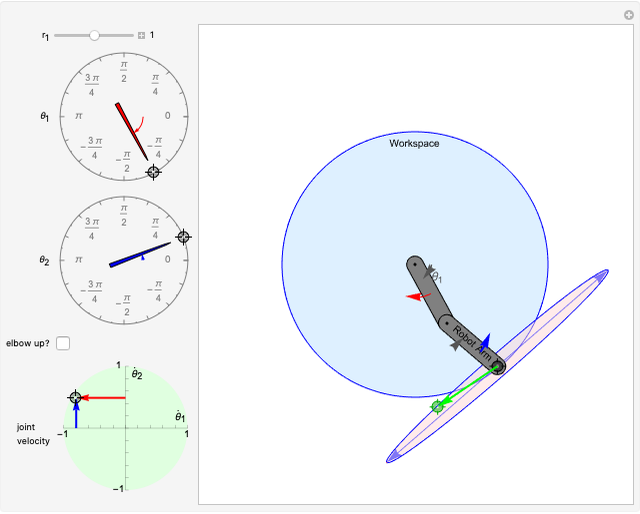 Forward and Inverse Kinematics for Two-Link Arm
Forward and Inverse Kinematics for Two-Link Arm
Aaron T. Becker and Lillian Lin Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Haoran Zhao and Aaron T. Becker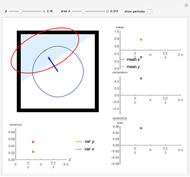 Distribution of a Robot Swarm in a Square under Gravity
Distribution of a Robot Swarm in a Square under Gravity
Haoran Zhao and Aaron T. Becker Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker and Shiva Shahrokhi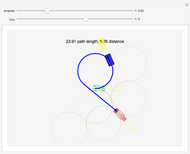 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker and Shiva Shahrokhi Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao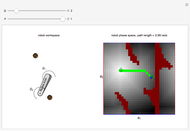 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala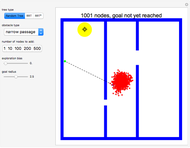 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker and Li Huang The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker and Javier Garcia
-
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
 Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker -
The Homicidal Chauffeur Problem
Aaron T. Becker -
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
Isochrons for a Dubins Car
Aaron T. Becker -
Shortest Path for the Dubins Car
Aaron T. Becker -
 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker -
 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker -
 Moving Two Particles with Shared Control Inputs Using Wall Friction
Moving Two Particles with Shared Control Inputs Using Wall Friction
Aaron T. Becker -
 Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker -
 Common Robot Arm Configurations
Common Robot Arm Configurations
Aaron T. Becker -
Distribution of a Robot Swarm in a Square under Gravity
Aaron T. Becker -
 Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Aaron T. Becker -
 Chart for a Torus
Chart for a Torus
Aaron T. Becker -
 Defects in an Optical Fiber
Defects in an Optical Fiber
Aaron T. Becker -
 Synthesis with Even and Odd Functions
Synthesis with Even and Odd Functions
Aaron T. Becker