Robotics Application of Lissajous Curves




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
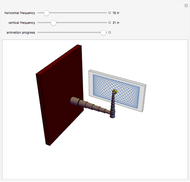
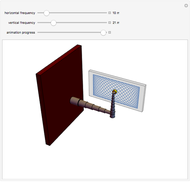
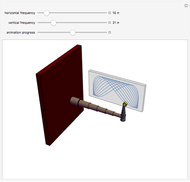
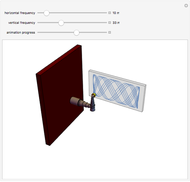
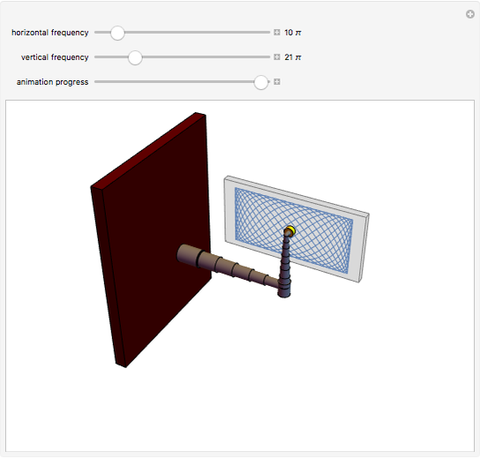
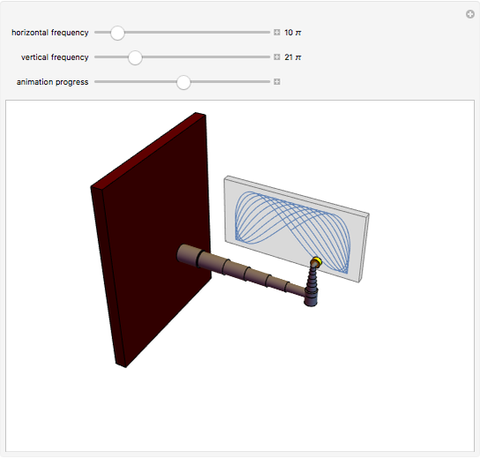
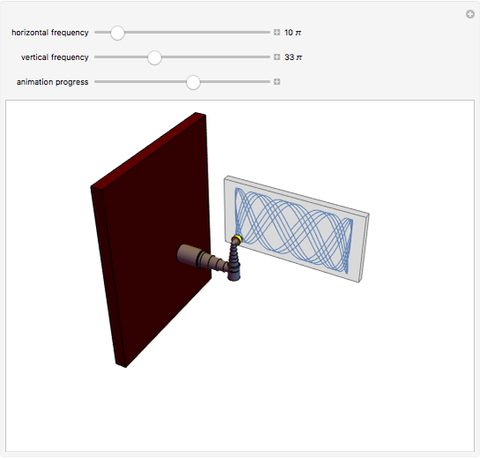
This Demonstration shows a polishing robotic arm whose pad moves following a Lissajous curve, which is being drawn in the screen during the animation. You can vary the frequencies of the vertical and horizontal movements using their respective controls. According to these values, different curves are constructed. The animation finishes when the curve has completed a whole period. The animation simulates the movement of the individual parts that form the robotic arm.
Contributed by: Francisco Velázquez (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
The movement is determined by the parametric function  (horizontal movement) and
(horizontal movement) and  (vertical movement), where
(vertical movement), where  and
and  are the frequencies for each function. Since these frequencies are multiples of
are the frequencies for each function. Since these frequencies are multiples of  , the period of the Lissajous curve is calculated as the least common multiple (LCM) of the vertical and horizontal periods; the animation finishes when the period of the curve is completed. If you change the frequencies, the period will be recalculated instantly. The animation progress control does not depend on the period of the curve.
, the period of the Lissajous curve is calculated as the least common multiple (LCM) of the vertical and horizontal periods; the animation finishes when the period of the curve is completed. If you change the frequencies, the period will be recalculated instantly. The animation progress control does not depend on the period of the curve.
Based on an exercise taken from [1].
Reference
[1] H. Anton, I. Bivens, and S. Davis, Calculus—Early Transcendentals, 9th ed., New York: John Wiley & Sons, 2008.
Permanent Citation
"Robotics Application of Lissajous Curves"
http://demonstrations.wolfram.com/RoboticsApplicationOfLissajousCurves/
Wolfram Demonstrations Project
Published: March 7 2011
 Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker, Haoran Zhao and Li Huang Robot Builder
Robot Builder
Frank Liao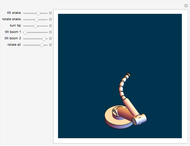 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu Motions of a Hexapod Robot
Motions of a Hexapod Robot
Jim Fowler Model of an Industrial Robot Arm
Model of an Industrial Robot Arm
Karl Scherer Inverse Kinematics in Redundant Robot Manipulator
Inverse Kinematics in Redundant Robot Manipulator
André Carvalho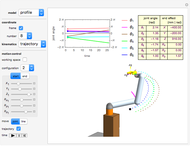 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu