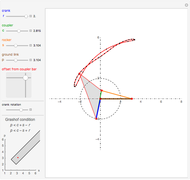
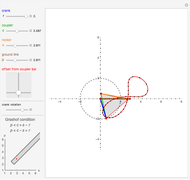
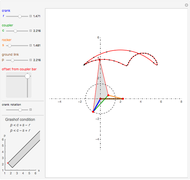
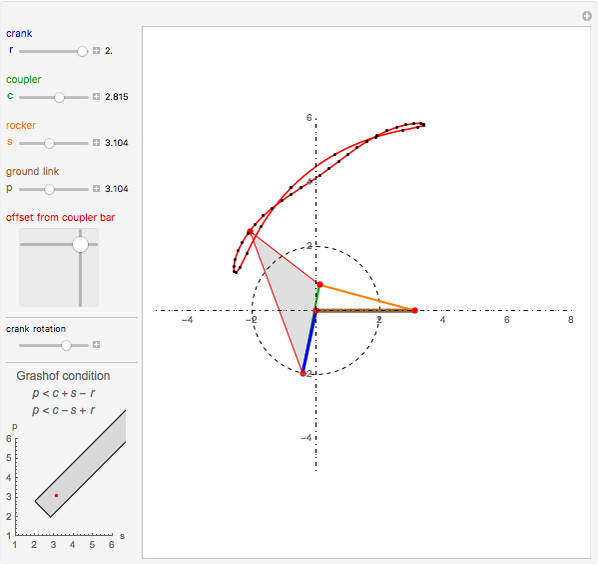
Coupler Curve Atlas for the Four-Bar Linkage

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
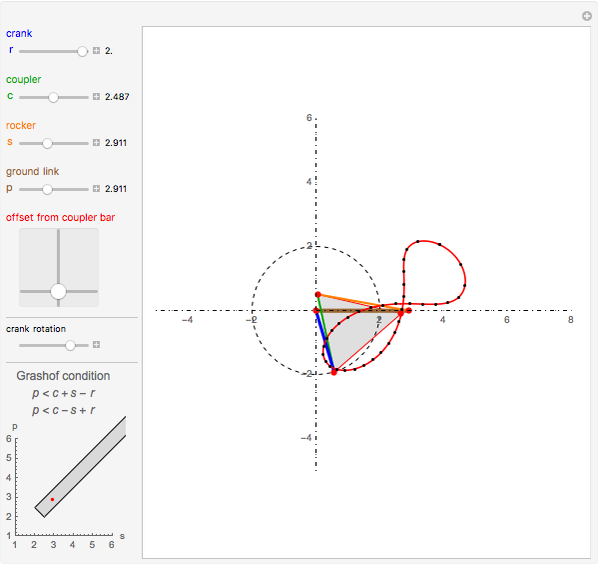
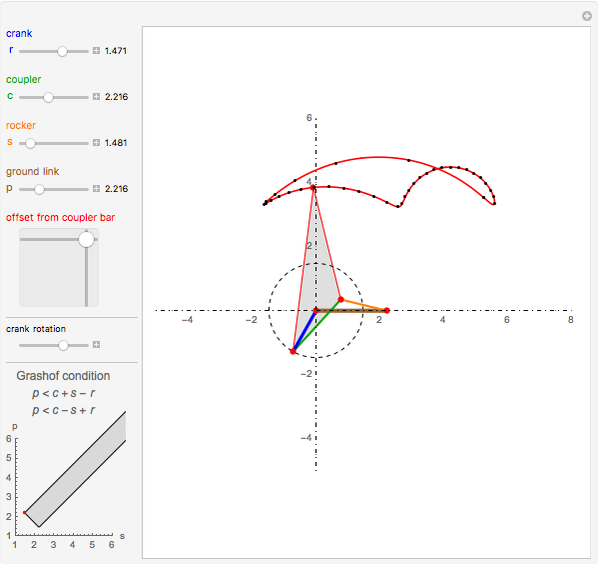
In the design of mechanisms, linkages are used to create motions with a specific course of position and speed.
[more]


Contributed by: Erik Mahieu (May 2016)
Open content licensed under CC BY-NC-SA
Snapshots
Details
In order to be of the crank-rocker type, the links have to meet Grashof's law [1], which states that the sum of the longest and the shortest link must be less than or equal to the sum of the remaining two links. This condition must be met to allow at least one link to make a complete revolution.
The Freudenstein equation [3] is used to compute the angular positions of the linkage bars.
References
[1] "Grashof's Law." eNotes: Mechanical Engineering. (May 23, 2016) engineeronadisk.com/notes_mechanic/mechanismsa6.html.
[2] J. A. Hrones and G. L. Nelson. Analysis of the Four Bar linkage: Its Application to the Synthesis of Mechanisms, Scribd. www.scribd.com/doc/214820022/Hrones-and-Nelson-Atlas.
[3] A. Ghosal. "The Freudenstein Equation and Design of Four-link Mechanisms." (May 23, 2016) www.mecheng.iisc.ernet.in/~asitava/resonance10.pdf.
Permanent Citation
 Watt's Lemniscoidal Linkage
Watt's Lemniscoidal Linkage
Erik Mahieu Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker and Shiva Shahrokhi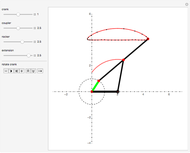 Coupler Curves of a Four-Bar Linkage
Coupler Curves of a Four-Bar Linkage
Erik Mahieu Rolling Cycloidal Curves
Rolling Cycloidal Curves
Erik Mahieu Chebyshev Walking Machine
Chebyshev Walking Machine
Erik Mahieu Polar Plots Drawn by a Mechanical Linkage
Polar Plots Drawn by a Mechanical Linkage
Erik Mahieu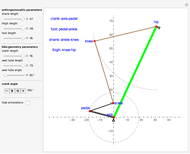 Five-Bar Linkage Model of the Bicycle-Rider System
Five-Bar Linkage Model of the Bicycle-Rider System
Erik Mahieu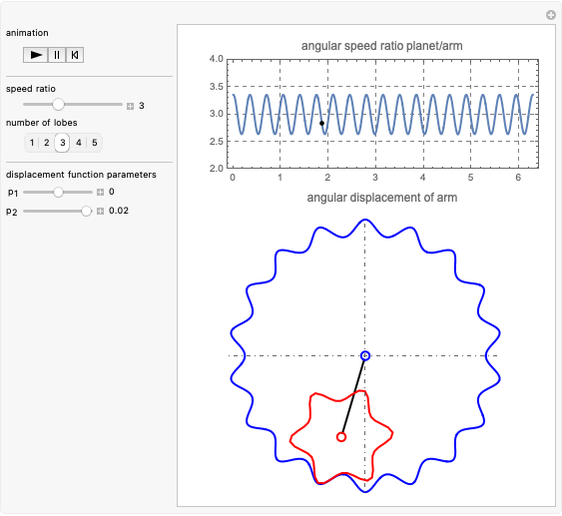 Noncircular Planetary Drive
Noncircular Planetary Drive
Erik Mahieu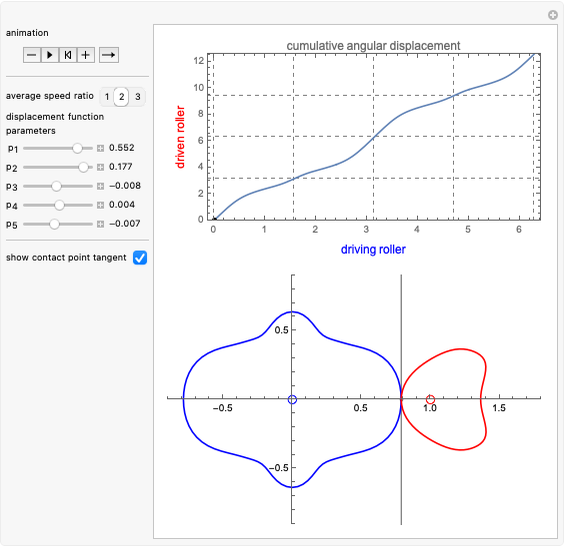 Noncircular Roller Drive
Noncircular Roller Drive
Erik Mahieu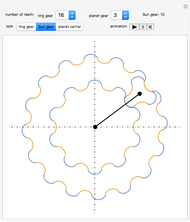 Planetary Gear Train
Planetary Gear Train
Erik Mahieu
-
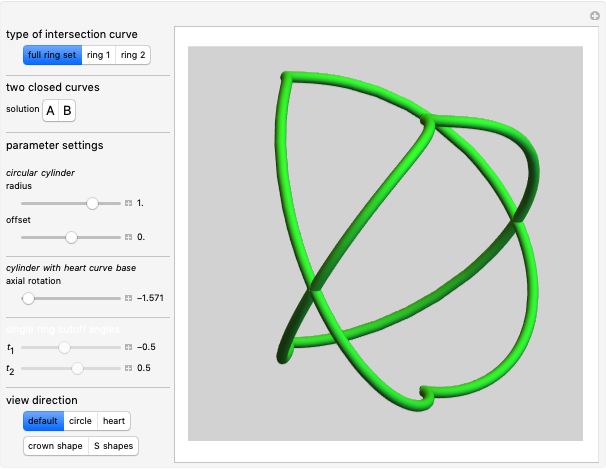 4. Ambiguous Rings Based on a Heart Curve
4. Ambiguous Rings Based on a Heart Curve
Erik Mahieu -
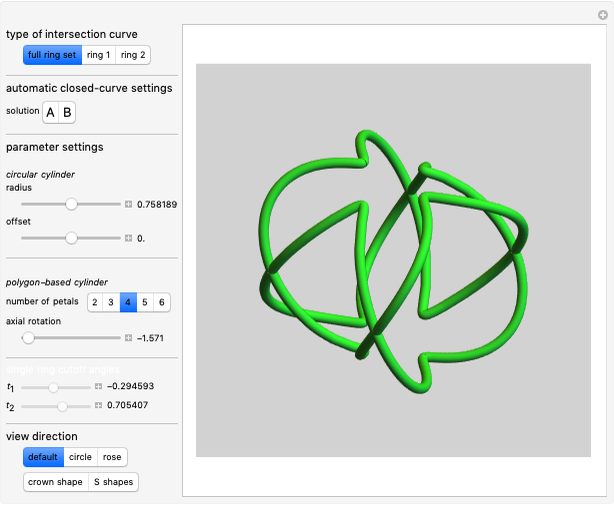 3. Ambiguous Rings Based on a Rose Curve
3. Ambiguous Rings Based on a Rose Curve
Erik Mahieu -
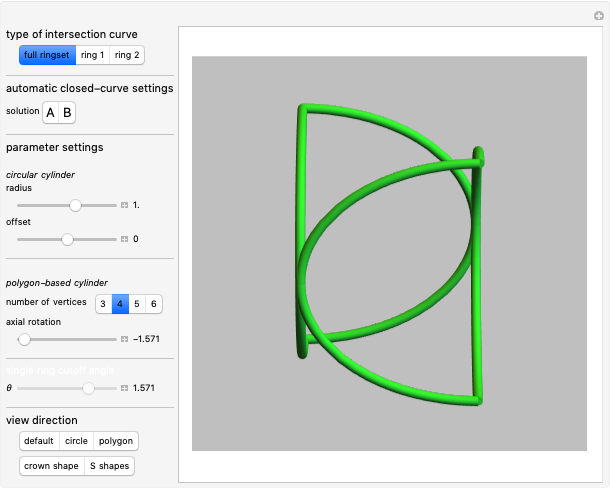 2. Ambiguous Rings Based on a Polygon
2. Ambiguous Rings Based on a Polygon
Erik Mahieu -
Noncircular Planetary Drive
Erik Mahieu -
Noncircular Roller Drive
Erik Mahieu -
Planetary Gear Train
Erik Mahieu -
Rolling Cycloidal Curves
Erik Mahieu -
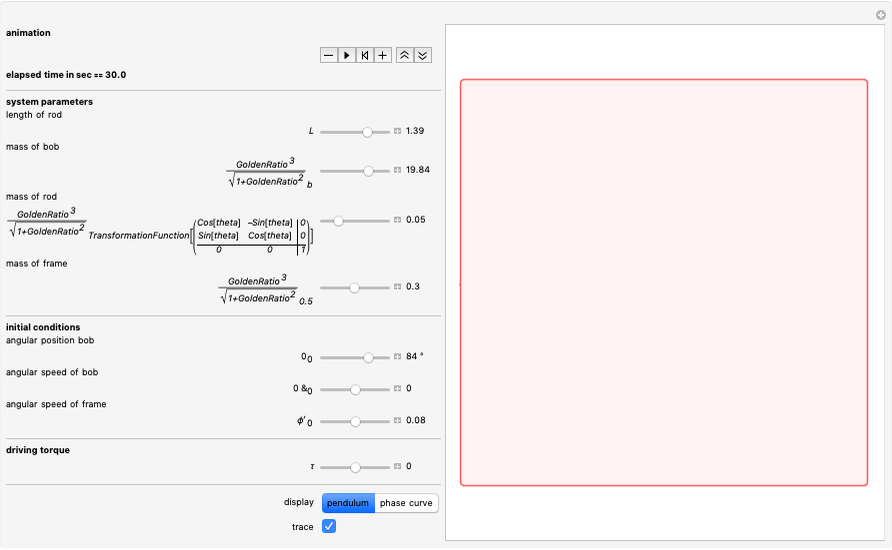 Driven Spherical Pendulum
Driven Spherical Pendulum
Erik Mahieu -
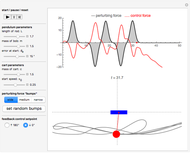 Automatic Feedback Control of a Pendulum-and-Cart System
Automatic Feedback Control of a Pendulum-and-Cart System
Erik Mahieu -
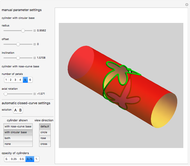 Intersection of a Generalized Cylinder over a Rose Curve with a Circular Cylinder
Intersection of a Generalized Cylinder over a Rose Curve with a Circular Cylinder
Erik Mahieu -
 1. Ambiguous Rings
1. Ambiguous Rings
Erik Mahieu -
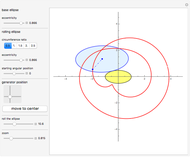 Elliptic Epitrochoid
Elliptic Epitrochoid
Erik Mahieu -
 Intersection of Two Polygonal Cylinders
Intersection of Two Polygonal Cylinders
Erik Mahieu -
 Designs from Mechanical Linkages
Designs from Mechanical Linkages
Erik Mahieu -
 3D Extrusion Using the Frenet-Serret System
3D Extrusion Using the Frenet-Serret System
Erik Mahieu -
 Daylight Calculator
Daylight Calculator
Erik Mahieu -
 Astronomical Clock
Astronomical Clock
Erik Mahieu -
 Cylindrical Anamorphosis of 3D Polygonal Meshes
Cylindrical Anamorphosis of 3D Polygonal Meshes
Erik Mahieu -
 Cylindrical Anamorphosis of Parametric Surfaces
Cylindrical Anamorphosis of Parametric Surfaces
Erik Mahieu -
 Roulette (Hypotrochogon) of a Polygon Rolling inside a Circle
Roulette (Hypotrochogon) of a Polygon Rolling inside a Circle
Erik Mahieu