Noncircular Planetary Drive



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
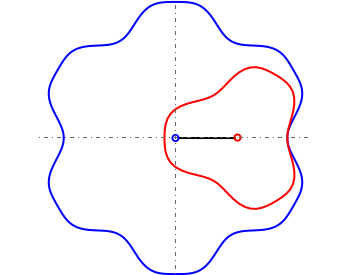
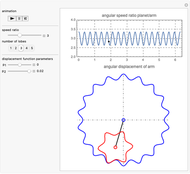
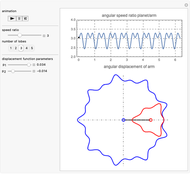
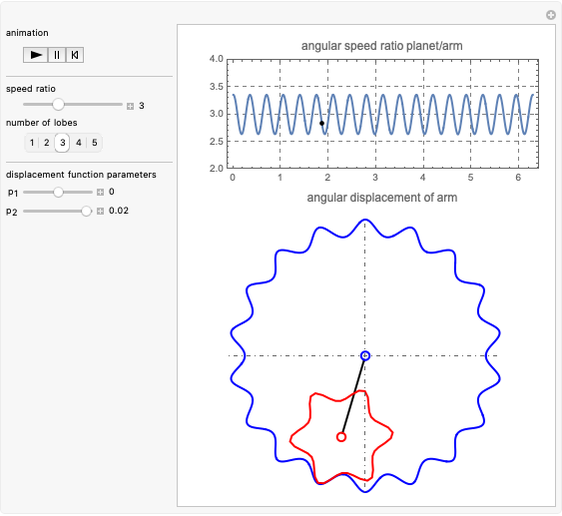
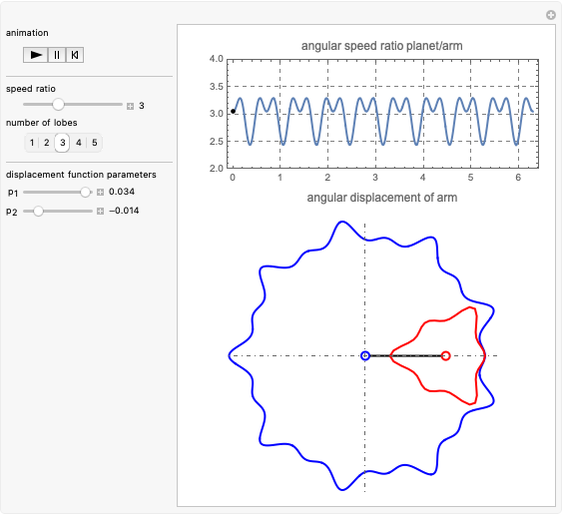
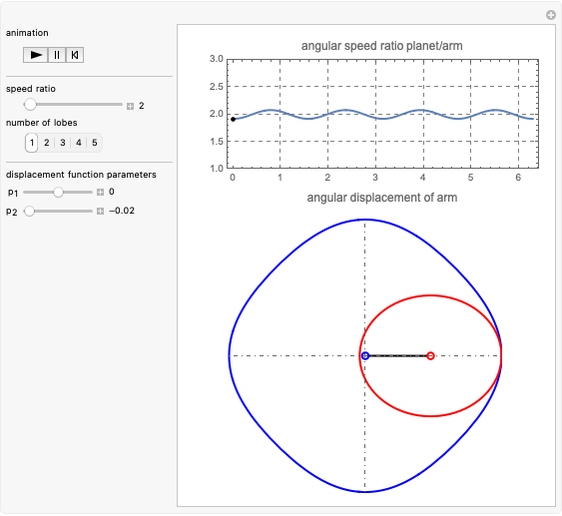
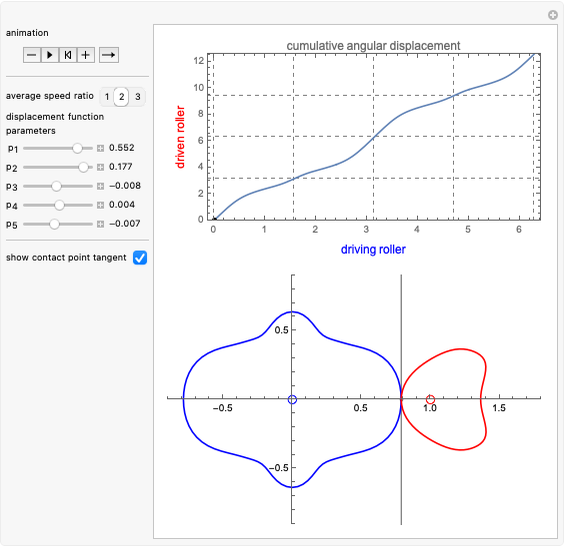
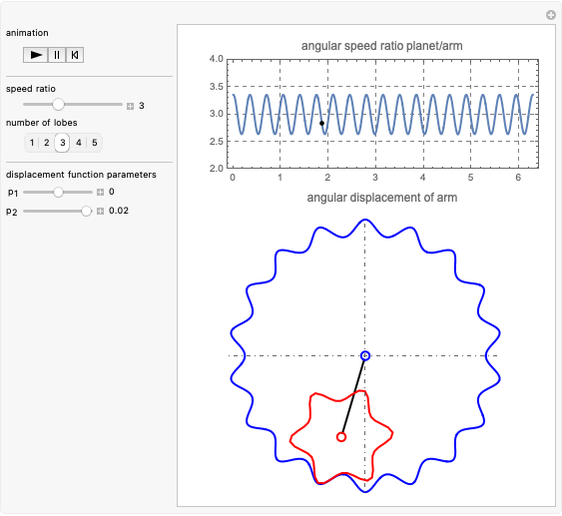
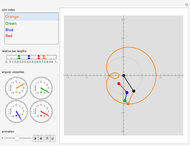
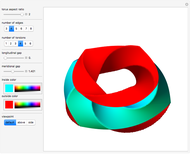
This Demonstration simulates a noncircular planetary roller drive by two curves (ring and planet), with the inside planet rolling without slipping.
[more]


Contributed by: Erik Mahieu (January 2014)
Open content licensed under CC BY-NC-SA
Details
The cumulative angular displacement function that generates the ring curve is given by  . The radii at the mutual contact point are
. The radii at the mutual contact point are  and
and  . These are effectively the polar equations of the two curves.
. These are effectively the polar equations of the two curves.
For a good article about noncircular gears, see [1].
Reference
[1] J. Doric, I. Klinar, and M. Dori, "One Approach for Modelling Intermittent Motion Mechanism with Noncircular Gears," Machine Design, 3(2), 2011 pp. 121–126. www.mdesign.ftn.uns.ac.rs/pdf/2011/no2/121-126.pdf.
Snapshots
Permanent Citation
 Noncircular Roller Drive
Noncircular Roller Drive
Erik Mahieu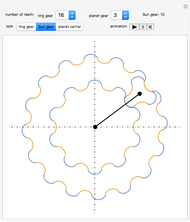 Planetary Gear Train
Planetary Gear Train
Erik Mahieu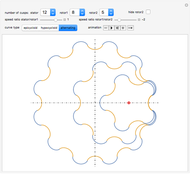 Rolling Cycloidal Curves
Rolling Cycloidal Curves
Erik Mahieu Offset Slider-Crank Mechanism
Offset Slider-Crank Mechanism
Erik Mahieu Hypocyclic Mechanism
Hypocyclic Mechanism
Erik Mahieu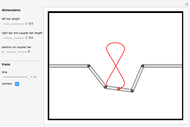 Watt's Lemniscoidal Linkage
Watt's Lemniscoidal Linkage
Erik Mahieu Coupler Curve Atlas for the Four-Bar Linkage
Coupler Curve Atlas for the Four-Bar Linkage
Erik Mahieu Ropes as Nested Helices
Ropes as Nested Helices
Erik Mahieu Parabolograph
Parabolograph
Erik Mahieu Garage Door Lift Mechanisms
Garage Door Lift Mechanisms
Erik Mahieu
-
 Bouncing Bob Pendulum
Bouncing Bob Pendulum
Erik Mahieu -
Noncircular Roller Drive
Erik Mahieu -
 Noncircular Planetary Drive
Noncircular Planetary Drive
Erik Mahieu -
 Astronomical Clock
Astronomical Clock
Erik Mahieu -
 Intersection of Three Polygonal Cylindrical Surfaces
Intersection of Three Polygonal Cylindrical Surfaces
Erik Mahieu -
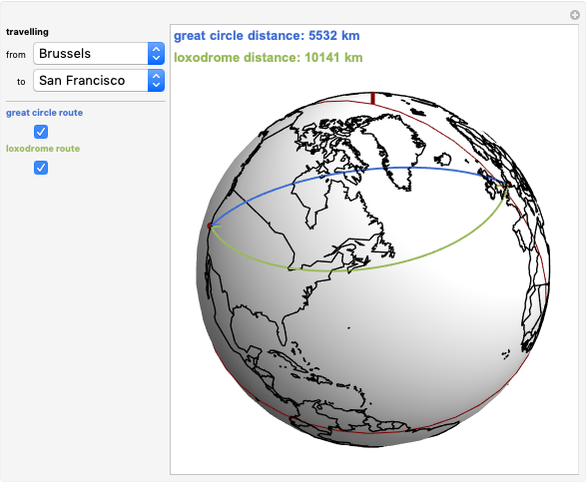 Comparing Loxodromes and Great Circle Routes
Comparing Loxodromes and Great Circle Routes
Erik Mahieu -
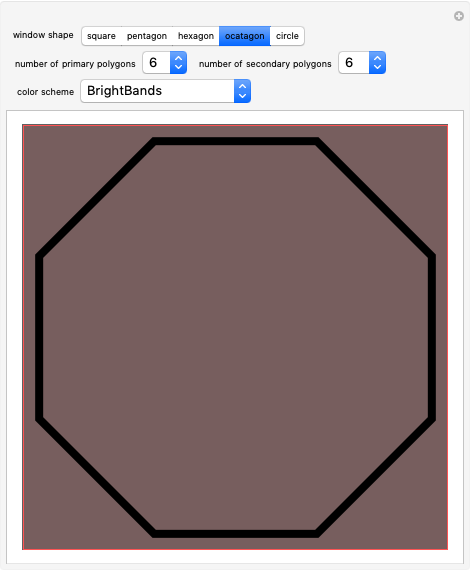 Stained Glass Window Generator
Stained Glass Window Generator
Erik Mahieu -
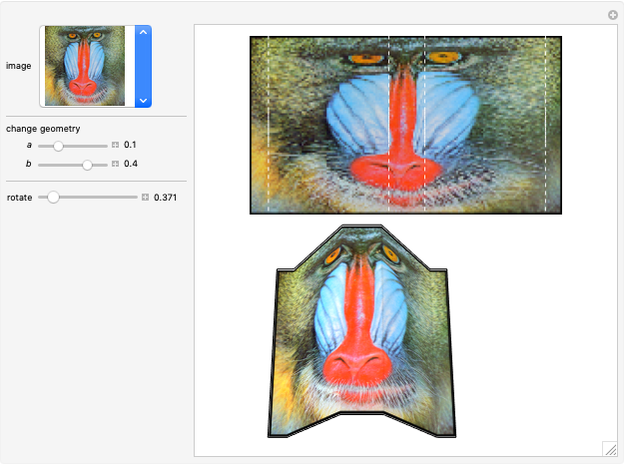 Developing a Perspective Anamorphic Image
Developing a Perspective Anamorphic Image
Erik Mahieu -
 Creating Posters from Photographic Images
Creating Posters from Photographic Images
Erik Mahieu -
 Tracing Contour Lines in Photographic Images
Tracing Contour Lines in Photographic Images
Erik Mahieu -
 Ellipse Rolling inside a Circle
Ellipse Rolling inside a Circle
Erik Mahieu -
 Polar Curve Generator with Five-Bar Linkage
Polar Curve Generator with Five-Bar Linkage
Erik Mahieu -
 Anamorphic Text Messages
Anamorphic Text Messages
Erik Mahieu -
 Conical Perspective Anamorphosis of Polygons
Conical Perspective Anamorphosis of Polygons
Erik Mahieu -
 Find Your Name in Pi
Find Your Name in Pi
Erik Mahieu -
 Spherical Mirror Anamorphosis of Regular Polygons
Spherical Mirror Anamorphosis of Regular Polygons
Erik Mahieu -
 Toroidal Flowers (Twisted Polygonal Tori)
Toroidal Flowers (Twisted Polygonal Tori)
Erik Mahieu -
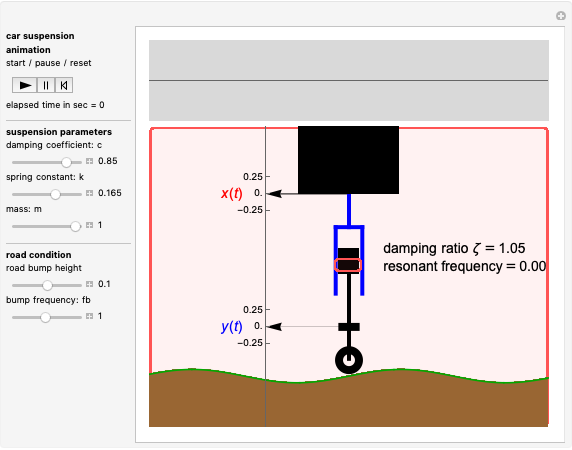 Simulating Vehicle Suspension with a Simplified Quarter-Car Model
Simulating Vehicle Suspension with a Simplified Quarter-Car Model
Erik Mahieu -
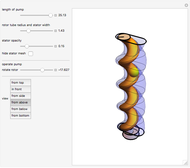 Moineau Progressing Cavity Pump
Moineau Progressing Cavity Pump
Erik Mahieu -
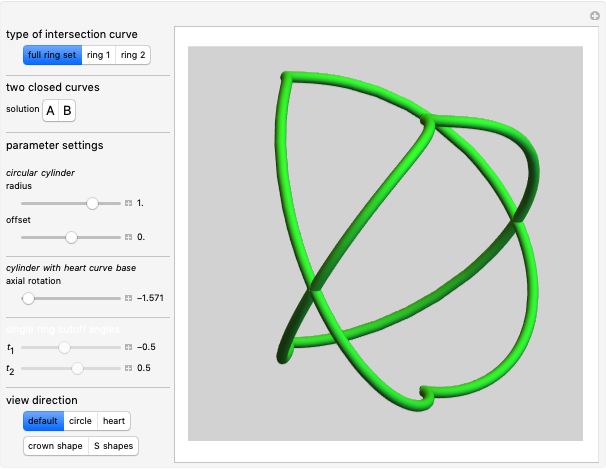 4. Ambiguous Rings Based on a Heart Curve
4. Ambiguous Rings Based on a Heart Curve
Erik Mahieu