Distribution of a Swarm of Robots in a Circular Workplace under Gravity
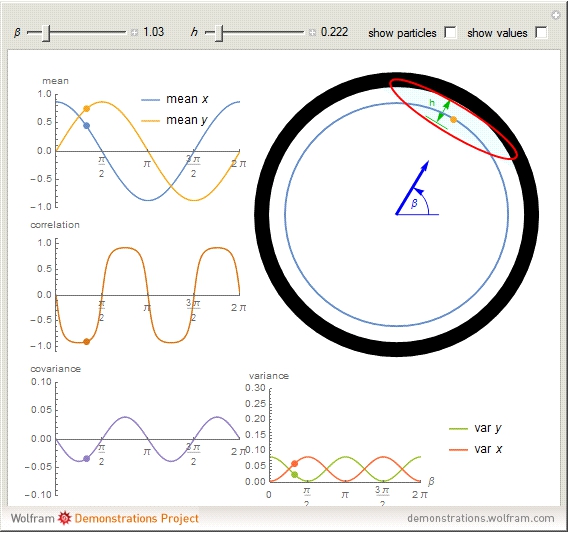
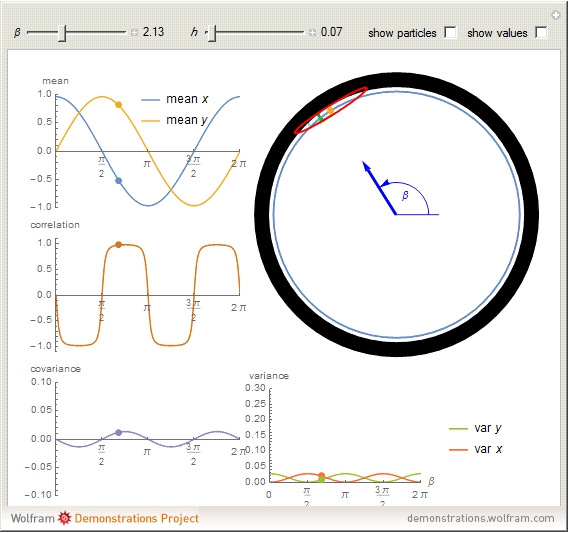
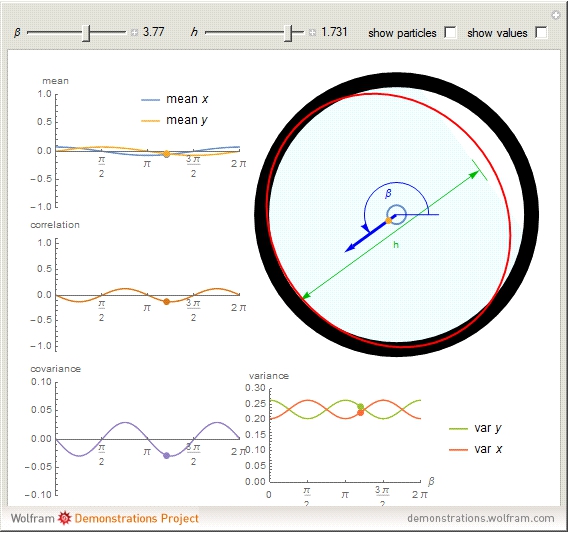
This Demonstration examines the mean, variance, correlation, and covariance of a very large swarm of robots as they move inside a circular workplace under the influence of gravity pointing in the direction . The swarm is large, whereas the robots are much smaller by comparison. Under gravity, the swarm flows like a liquid, moving to a side of the workplace and filling the area under a chord to height .
Though rectangular boundaries are common in artificial workspaces, biological workspaces are usually rounded. The workspace in this example is a circle centered at with radius 1 and thus area . For notational simplicity, the swarm is parameterized by the angle of the force of gravity and the fill level . The range of possible angles for the angle of the force of gravity is . In this range of angles, the swarm always fills the area under a chord, but this shape is rotated around the unit circle.
The area under a chord of a circle is the area of a sector less the area of the triangle originating at the circle center:
,
thus
,
where is the arc length, is the chord length, is the radius, and is the height. Solving for and gives
,
.
Therefore, the area under a chord is
.
For a circular workspace with given , the mean of and is:
,
.
The variance of and is:
,
,
and finally,
.
The locus of mean positions is aligned with , and the mean position is at radius from the center. The variance is maximized at and , while the covariance is maximized at and . For small values, the correlation approaches .


![[Snapshot]](HTMLImages/index.en/thumbnail_1.gif)
![[Snapshot]](HTMLImages/index.en/thumbnail_2.gif)
![[Snapshot]](HTMLImages/index.en/thumbnail_3.gif)


































 Browse all topics
Browse all topics