Robot Manipulator Workspaces

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
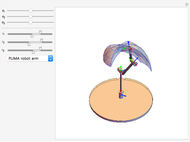
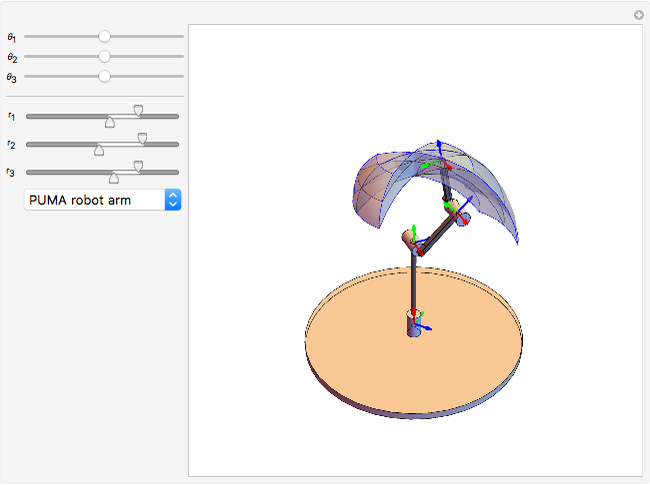
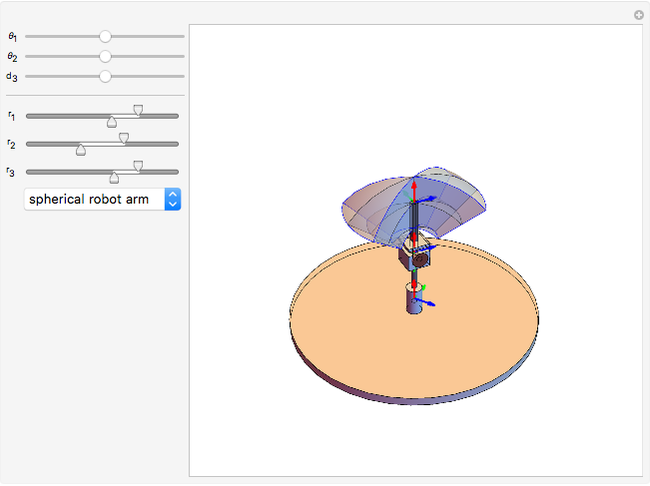
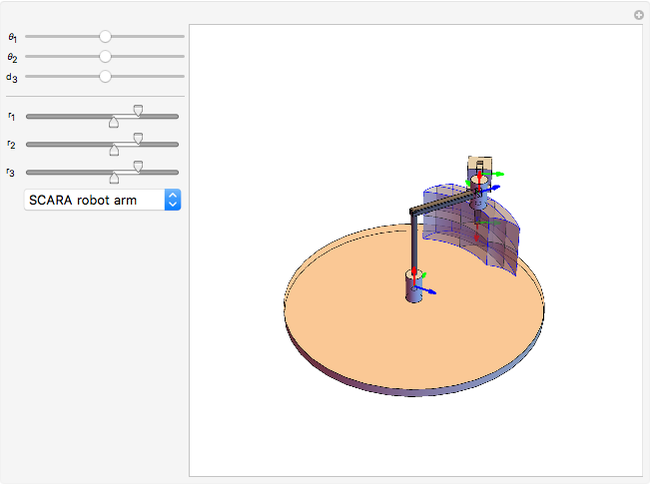
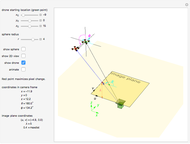
A robot's workspace is the total volume swept out by the end effector as the manipulator executes all possible motions. The shape of the workspace dictates the applications for which each design can be used. This Demonstration lets you load several robot designs to compare their workspaces. You can set the position and range for each joint using sliders.
Contributed by: Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati (December 2017)
Open content licensed under CC BY-NC-SA
Details
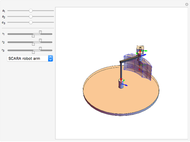
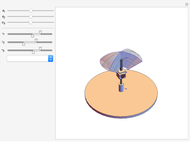
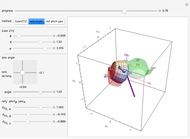
This Demonstration creates a serial-link robot arm with three joints (three degrees of freedom) and displays the robot workspace (the volume swept out by the end effector as the manipulator executes all possible motions). You can manipulate each joint using the sliders and select from a variety of robot types. The workspaces vary greatly and determine the tasks the robot is suited for.
In this Demonstration, prismatic joints and revolute joints are limited by the range sliders  ,
, and
and  . The range is between
. The range is between  and
and  . Changes to these range sliders or to the type of robot require recomputing the workspace, which is time-consuming. Changing the current position of the robot arm updates the graphic quickly.
. Changes to these range sliders or to the type of robot require recomputing the workspace, which is time-consuming. Changing the current position of the robot arm updates the graphic quickly.
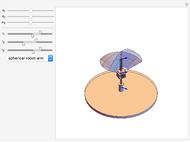
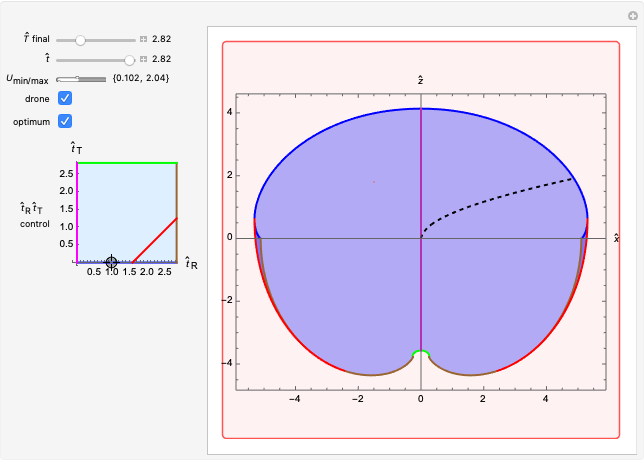
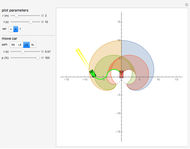
The shape of the workspace also indicates where the robots experience Jacobian singularities. Snapshot 1 shows the spherical manipulator at its default position, with the end effector pointing along the  axis. The manipulator can generate instantaneous motion in the
axis. The manipulator can generate instantaneous motion in the  (blue arrow) and
(blue arrow) and  (red arrow) axes but cannot move along the
(red arrow) axes but cannot move along the  (green arrow) axis.
(green arrow) axis.
The workspaces are generated by combining multiple 2D parametric plots. These plots correspond to the parameter  being set to its minimum, middle and maximum values, while the other parameters vary along their full ranges. For the Cartesian manipulator, this results in a cube that is divided into eight smaller cubes. For other types of robots, for instance the Stanford robot arm, the relation is less intuitive.
being set to its minimum, middle and maximum values, while the other parameters vary along their full ranges. For the Cartesian manipulator, this results in a cube that is divided into eight smaller cubes. For other types of robots, for instance the Stanford robot arm, the relation is less intuitive.
Reference
[1] M. W. Spong, S. Hutchinson and M. Vidyasagar, Robot Modeling and Control, Hoboken, NJ: John Wiley and Sons, 2006.
Snapshots
Permanent Citation
 Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker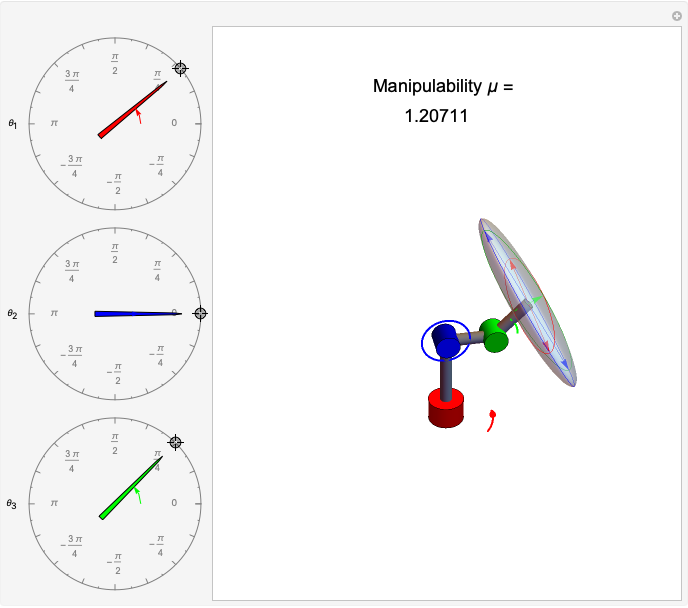 Manipulability Ellipsoid of a Robot Arm
Manipulability Ellipsoid of a Robot Arm
Aaron T. Becker and Mary Burbage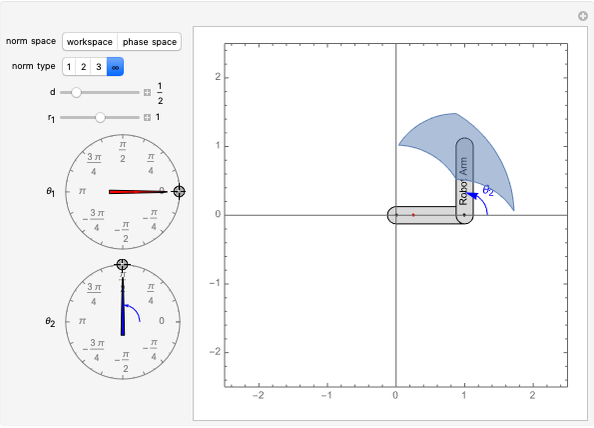 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker and Benedict Isichei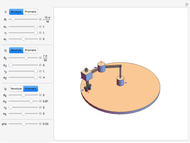 Denavit-Hartenberg Parameters for a Three-Link Robot
Denavit-Hartenberg Parameters for a Three-Link Robot
Aaron T. Becker and Mary Burbage Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao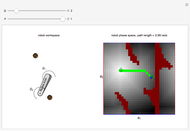 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala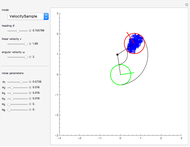 Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan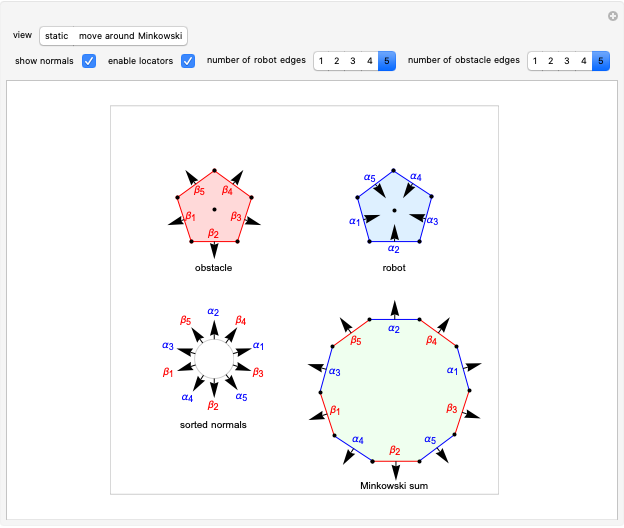 Minkowski Sum of Convex Robot and Obstacle
Minkowski Sum of Convex Robot and Obstacle
Shreyas Poyrekar, Arifa Sultana and Aaron T. Becker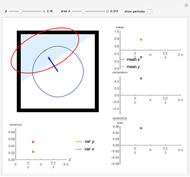 Distribution of a Robot Swarm in a Square under Gravity
Distribution of a Robot Swarm in a Square under Gravity
Haoran Zhao and Aaron T. Becker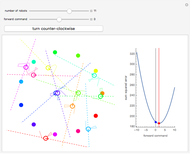 Ensemble Control of Robots with Unicycle Kinematics
Ensemble Control of Robots with Unicycle Kinematics
Aaron Becker
-
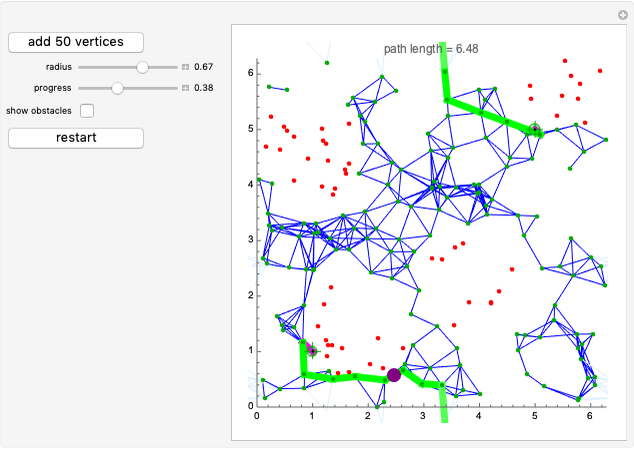 Probabilistic Roadmap Method
Probabilistic Roadmap Method
Aaron T. Becker -
 Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker -
 Reachable Set for a Drone
Reachable Set for a Drone
Aaron T. Becker -
 Smallest Circle Problem
Smallest Circle Problem
Aaron T. Becker -
 Art Gallery Problem
Art Gallery Problem
Aaron T. Becker -
 Visibility Region of a Polygon
Visibility Region of a Polygon
Aaron T. Becker -
Minkowski Sum of Convex Robot and Obstacle
Aaron T. Becker -
 Maximizing Apparent Velocity in a Camera's Frame
Maximizing Apparent Velocity in a Camera's Frame
Aaron T. Becker -
 Steering Multiple Radio Control (RC) Cars with One Joystick
Steering Multiple Radio Control (RC) Cars with One Joystick
Aaron T. Becker -
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker -
 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
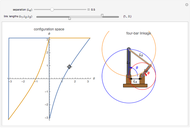 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker -
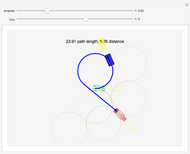 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker -
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
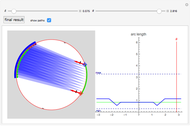
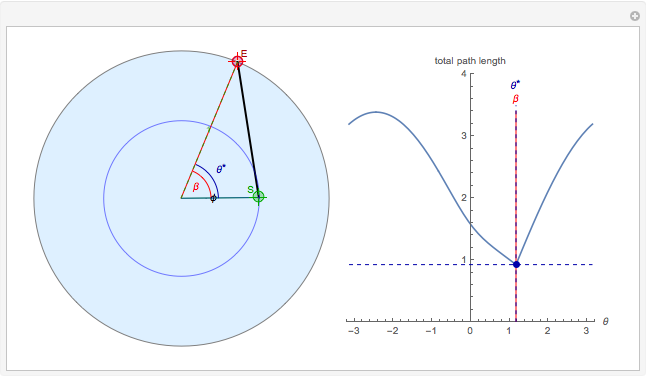 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker -
 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker