Distribution of a Robot Swarm in a Square under Gravity



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
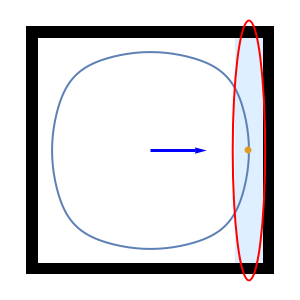
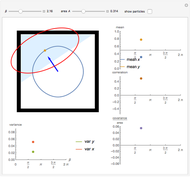
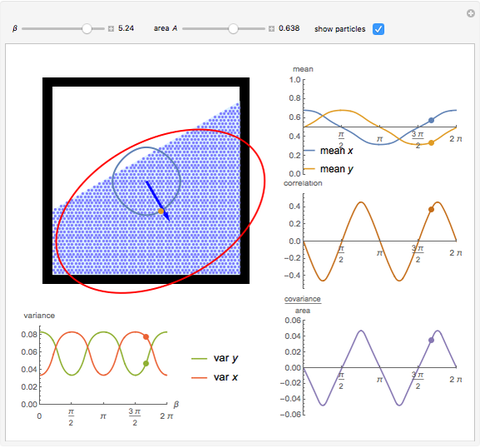
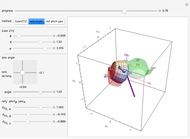
This Demonstration determines the mean, variance, and covariance for a very large swarm of robots as they move inside a square workplace under the influence of gravity, pointing in the direction  . The swarm is large, but the robots are comparatively small and together cover a constant area
. The swarm is large, but the robots are comparatively small and together cover a constant area  . Under gravity, they flow like a liquid, moving to one side of the workplace to form a polygonal shape.
. Under gravity, they flow like a liquid, moving to one side of the workplace to form a polygonal shape.
Contributed by: Haoran Zhao and Aaron T. Becker (January 2016)
Open content licensed under CC BY-NC-SA
Snapshots


Details
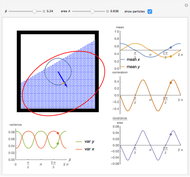
The direction of the force of gravity is determined by the angle , in  , such that the swarm can assume eight different polygonal shapes. The shapes alternate between triangles and trapezoids when
, such that the swarm can assume eight different polygonal shapes. The shapes alternate between triangles and trapezoids when  , and alternate between squares with one corner removed and trapezoids when
, and alternate between squares with one corner removed and trapezoids when  .
.
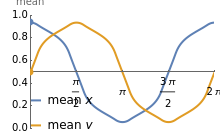
Computing the means  and
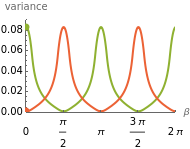
and  , variances
, variances  and
and  , covariance
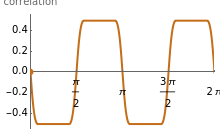
, covariance  , and correlation
, and correlation  requires integration over the area containing the swarm. One way is to use an indicator function
requires integration over the area containing the swarm. One way is to use an indicator function  that returns 1 if the point
that returns 1 if the point  is inside the region containing the swarm and 0 otherwise. The formulas are as follows, integrating over the unit square with
is inside the region containing the swarm and 0 otherwise. The formulas are as follows, integrating over the unit square with  and
and  from 0 to 1.
from 0 to 1.
 ,
,  ,
,
 ,
,  ,
,
 ,
,
 .
.
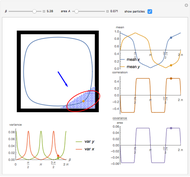
Instead of using an indicator function, the region of integration can be changed to only include the polygon containing the swarm. As an example calculation, if the force angle is , the mean when the swarm is in the lower-left corner is
 for and
for and  for .
for .
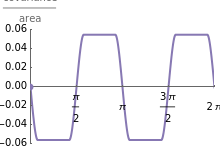
A few interesting results: the correlation is maximized when the swarm has a triangular shape, and equals  . The covariance of the triangle is always
. The covariance of the triangle is always  . Variance is maximized in one direction and minimized in the other when the swarm is in a rectangular position. Mean positions are maximized when is small.
. Variance is maximized in one direction and minimized in the other when the swarm is in a rectangular position. Mean positions are maximized when is small.
Permanent Citation
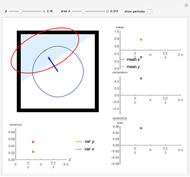
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Haoran Zhao and Aaron T. Becker Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati Ensemble Control of Robots with Unicycle Kinematics
Ensemble Control of Robots with Unicycle Kinematics
Aaron Becker Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao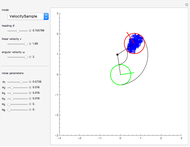 Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Manipulability Ellipsoid of a Robot Arm
Manipulability Ellipsoid of a Robot Arm
Aaron T. Becker and Mary Burbage Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala Denavit-Hartenberg Parameters for a Three-Link Robot
Denavit-Hartenberg Parameters for a Three-Link Robot
Aaron T. Becker and Mary Burbage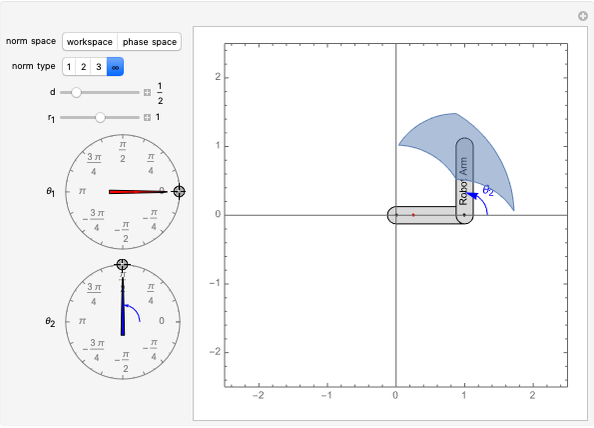 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker and Benedict Isichei
-
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
Robot Manipulator Workspaces
Aaron T. Becker -
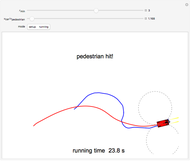 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker -
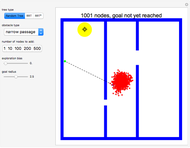 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
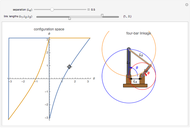 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker -
 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker -
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker -
 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker -
 Moving Two Particles with Shared Control Inputs Using Wall Friction
Moving Two Particles with Shared Control Inputs Using Wall Friction
Aaron T. Becker -
 Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker -
Common Robot Arm Configurations
Aaron T. Becker -
 Distribution of a Robot Swarm in a Square under Gravity
Distribution of a Robot Swarm in a Square under Gravity
Aaron T. Becker -
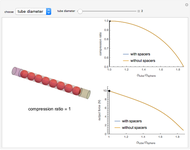 Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Aaron T. Becker -
 Chart for a Torus
Chart for a Torus
Aaron T. Becker -
 Defects in an Optical Fiber
Defects in an Optical Fiber
Aaron T. Becker -
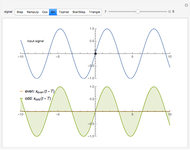 Synthesis with Even and Odd Functions
Synthesis with Even and Odd Functions
Aaron T. Becker