Roads and Wheels

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
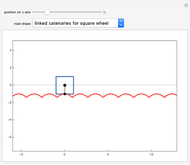
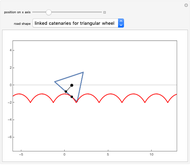
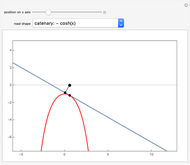
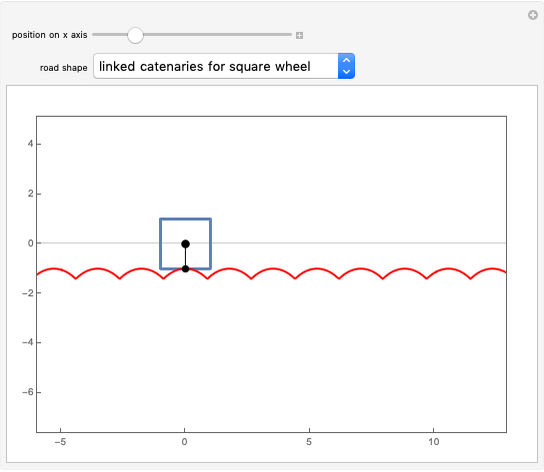
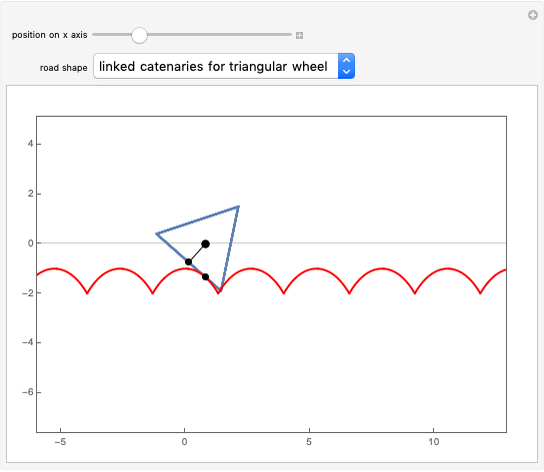
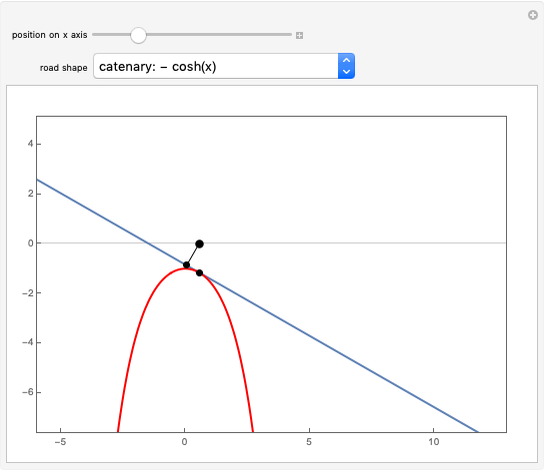
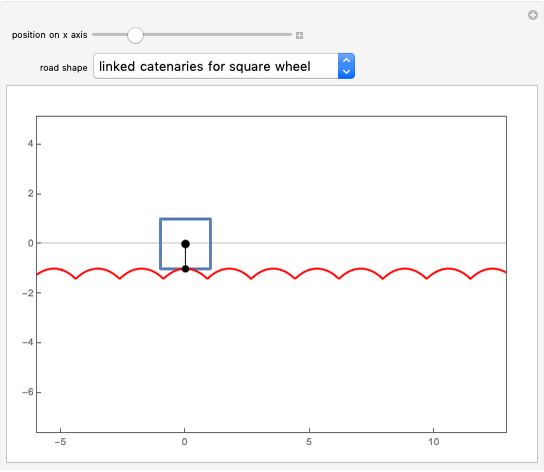
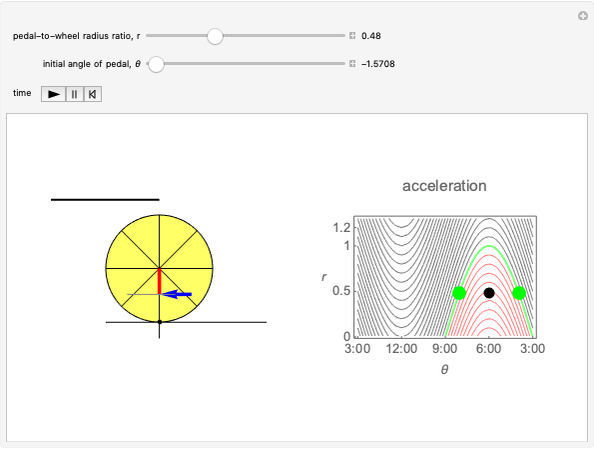
Given a road, one can solve a differential equation to get a wheel that will roll smoothly along the road in the sense that the center of the wheel does not move up or down. This Demonstration presents eight examples, the first being the famous one of a square wheel rolling on a series of linked catenaries. This example derives from the pure catenary case. The triangular case is of interest because the wheel actually crashes into the road before reaching the cusp. The parabola, given by  , is unusual in that the wheel is exactly congruent to the road. For a given road, the wheel will not necessarily close up; this is illustrated by the three cosine examples. When the standard cosine function has the distance of the road's top from the
, is unusual in that the wheel is exactly congruent to the road. For a given road, the wheel will not necessarily close up; this is illustrated by the three cosine examples. When the standard cosine function has the distance of the road's top from the  axis as
axis as  , then the wheel closes up over
, then the wheel closes up over  periods of the road. The cases of
periods of the road. The cases of  and
and  are illustrated, as well as a cosine case where the wheel does not close up.
are illustrated, as well as a cosine case where the wheel does not close up.
Contributed by: Stan Wagon (Macalester College, USA) (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Given the road in the form  , the wheel is given in polar coordinates by
, the wheel is given in polar coordinates by  , where
, where  is the solution to the differential equation
is the solution to the differential equation  with
with  . The details were first worked out by James Clerk Maxwell in 1849 [1], though his work seems to have been forgotten. A detailed modern investigation was carried out by G. B. Robison (1960) [2], who rediscovered the result found by Maxwell that a straight line rolls smoothly on a catenary. The important idea of truncating the catenary and line so as to get a rolling square is due to D. G. Wilson (1964) [3]. Further details and examples can be found in the paper by Hall and Wagon [4]. A photo of a working square-wheel tricycle can be found at the author's website [5].
. The details were first worked out by James Clerk Maxwell in 1849 [1], though his work seems to have been forgotten. A detailed modern investigation was carried out by G. B. Robison (1960) [2], who rediscovered the result found by Maxwell that a straight line rolls smoothly on a catenary. The important idea of truncating the catenary and line so as to get a rolling square is due to D. G. Wilson (1964) [3]. Further details and examples can be found in the paper by Hall and Wagon [4]. A photo of a working square-wheel tricycle can be found at the author's website [5].
References
[1] J. C. Maxwell, "On the Theory of Rolling Curves," Transactions of the Royal Society of Edinburgh, 16(5), 1849 pp. 519–540 (p. 537, Ex. 12). archive.org/details/transactionsofro16roy/page/518/mode/2up.
[2] G. B. Robison, "Rockers and Rollers," Mathematics Magazine, 33(3), 1960 pp. 139–144. (Result first in E1033 1952.) www.jstor.org/stable/3029034?origin=crossref.
[3] D. G. Wilson, Problem E1668, American Mathematical Monthly, 71(2), 1964 p. 205. Solution: 72(1), 1965 pp. 82–83.
[4] L. Hall and S. Wagon, "Roads and Wheels," Mathematics Magazine, 65(5), 1992 pp. 283–301. doi.org/10.1080/0025570X .1992.11996043.
[5] S. Wagon. stanwagon.com.
Permanent Citation
 Hyperboloid Geodesics
Hyperboloid Geodesics
Antonin Slavik Cone Geodesics
Cone Geodesics
Antonin Slavik Shaping a Road and Finding the Corresponding Wheel
Shaping a Road and Finding the Corresponding Wheel
Stan Wagon (Macalester College) Catacaustics Generated by a Point Source
Catacaustics Generated by a Point Source
Michael Rogers (Oxford College of Emory University)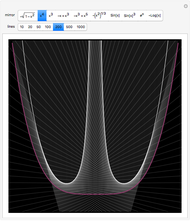 Catacaustics for Some Graphs
Catacaustics for Some Graphs
Michael Rogers (Oxford College of Emory University) Gauss Map and Curvature
Gauss Map and Curvature
Michael Rogers (Oxford College/Emory University) Unwrapping Involutes
Unwrapping Involutes
Michael Rogers (Oxford College of Emory University) Surfaces of Revolution with Constant Gaussian Curvature
Surfaces of Revolution with Constant Gaussian Curvature
Antonin Slavik Schwarzschild Space-Time Embedding Diagram
Schwarzschild Space-Time Embedding Diagram
Ben Langton Intrinsically Defined Curves
Intrinsically Defined Curves
Kovas Boguta and Fred Meinberg
-
 Roads and Wheels
Roads and Wheels
Stan Wagon -
 Center of Mass of a Polygon
Center of Mass of a Polygon
Stan Wagon -
 Bicycle or Unicycle Tracks?
Bicycle or Unicycle Tracks?
Stan Wagon -
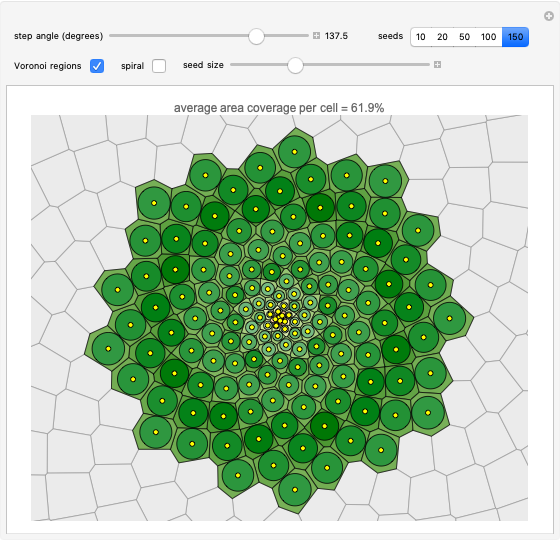 Voronoi Polygons in an Archimedean Spiral
Voronoi Polygons in an Archimedean Spiral
Stan Wagon -
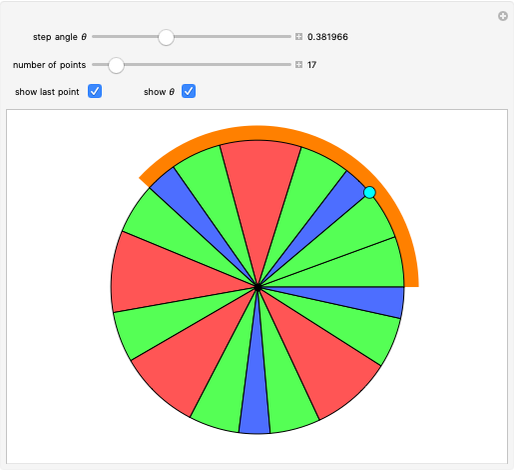 The Three-Gap Theorem
The Three-Gap Theorem
Stan Wagon -
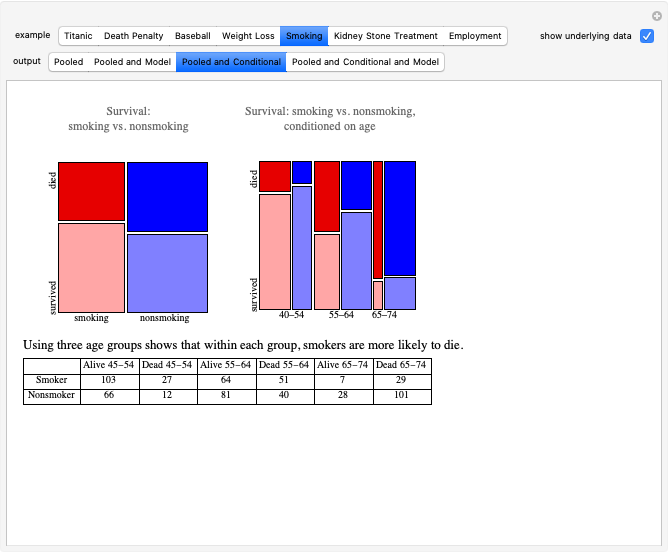 Simpson's Paradox
Simpson's Paradox
Stan Wagon -
 The Bicycle Paradox
The Bicycle Paradox
Stan Wagon -
 The Facilities Location Problem
The Facilities Location Problem
Stan Wagon -
 Tours through a Graph
Tours through a Graph
Stan Wagon -
 The Buffon Noodle Problem
The Buffon Noodle Problem
Stan Wagon -
 Perfect 1-Factorizations of Graphs
Perfect 1-Factorizations of Graphs
Stan Wagon -
 Four-Coloring Planar Graphs
Four-Coloring Planar Graphs
Stan Wagon -
 Trajectory on a Polyhedron from a Vertex to Itself
Trajectory on a Polyhedron from a Vertex to Itself
Stan Wagon -
 Nonplanar Rectangular Heptagons
Nonplanar Rectangular Heptagons
Stan Wagon -
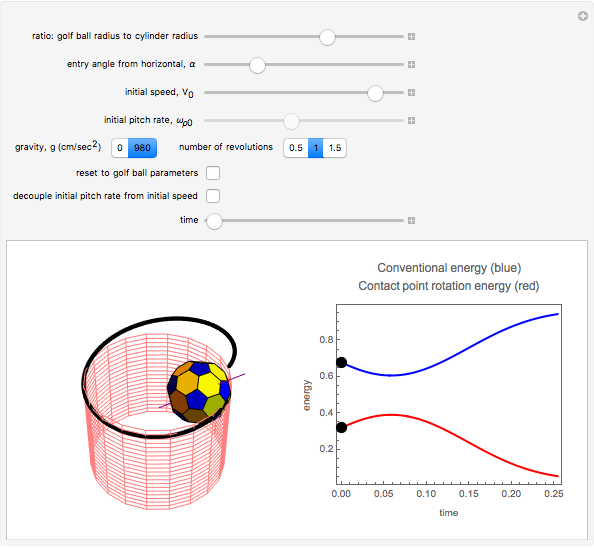 Rolling Ball inside a Cylinder
Rolling Ball inside a Cylinder
Stan Wagon -
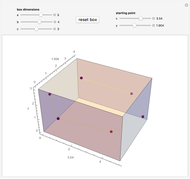 3D Billiard Loop in a Rectangular Box
3D Billiard Loop in a Rectangular Box
Stan Wagon -
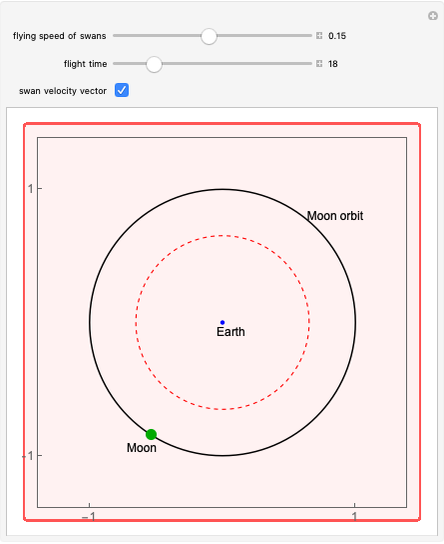 Flying to the Moon
Flying to the Moon
Stan Wagon -
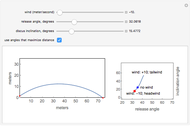 Discus Flight
Discus Flight
Stan Wagon -
 Paths inside a Polygon
Paths inside a Polygon
Stan Wagon -
 Penrose's Train Challenge
Penrose's Train Challenge
Stan Wagon