Binocular Disparity (Visual Depth Perception 7)



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
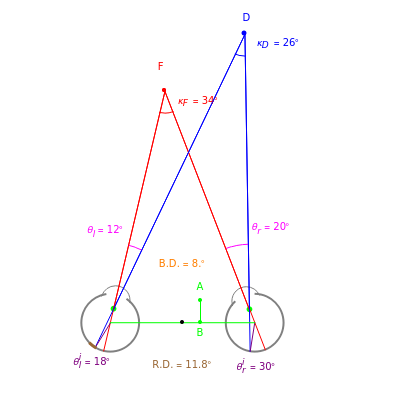
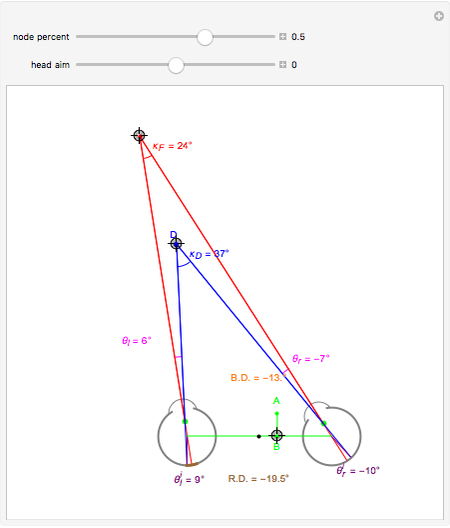
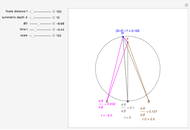
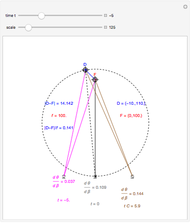
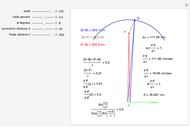
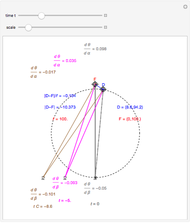
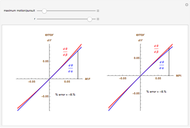
This Demonstration shows binocular and retinal disparity. Since our eyes are separated, they receive slightly different images, a "disparity". Mathematically, binocular disparity is the difference between the "convergence angles"  . Binocular disparity is shown in degrees in orange. The scale is very small to exaggerate the angles in order to see what they measure at normal viewing distances.
. Binocular disparity is shown in degrees in orange. The scale is very small to exaggerate the angles in order to see what they measure at normal viewing distances.


Contributed by: Keith Stroyan (March 2011)
Open content licensed under CC BY-NC-SA
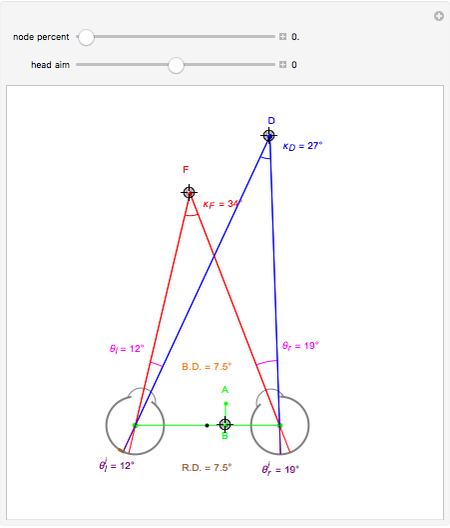
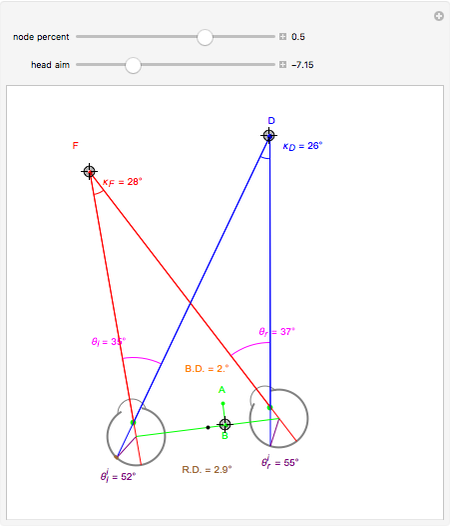
Snapshots


Details
Binocular disparity has been studied since Euclid, but was popularized by Wheatstone about 150 years ago with the invention of the "stereoscope".
Binocular disparity is constant on circles through the node points of the eyes, as we show in the Demonstration "Vieth–Müller Circles (Visual Depth Perception 8)" (see Related Links). The connection between depth and disparity is shown in the Demonstrations "Disparity, Convergence and Depth (Visual Depth Perception 10)" and "Binocular Disparity versus Depth (Visual Depth Perception 9)" (see Related Links).
For more information on stereoscopic vision see the Wikipedia page and the introduction in the Demonstration "Motion/Pursuit Law in 1D (Visual Depth Perception 1)" (see Related Links).
Permanent Citation
 Binocular Disparity versus Depth (Visual Depth Perception 9)
Binocular Disparity versus Depth (Visual Depth Perception 9)
Keith Stroyan Disparity, Convergence, and Depth (Visual Depth Perception 10)
Disparity, Convergence, and Depth (Visual Depth Perception 10)
Keith Stroyan Tracking and Separation (Visual Depth Perception 11)
Tracking and Separation (Visual Depth Perception 11)
Keith Stroyan Vieth-Müller Circles (Visual Depth Perception 8)
Vieth-Müller Circles (Visual Depth Perception 8)
Keith Stroyan Eye Parameters (Visual Depth Perception 6)
Eye Parameters (Visual Depth Perception 6)
Keith Stroyan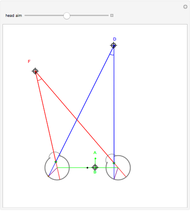 Fixation and Distraction (Visual Depth Perception 5)
Fixation and Distraction (Visual Depth Perception 5)
Keith Stroyan Speed, Motion, Pursuit, and Depth (Visual Depth Perception 15)
Speed, Motion, Pursuit, and Depth (Visual Depth Perception 15)
Keith Stroyan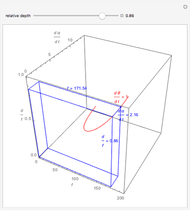 Motion Parallax versus Depth, 3D (Visual Depth Perception 13)
Motion Parallax versus Depth, 3D (Visual Depth Perception 13)
Keith Stroyan Motion Parallax versus Depth, 2D (Visual Depth Perception 12)
Motion Parallax versus Depth, 2D (Visual Depth Perception 12)
Keith Stroyan Motion/Pursuit Law in 1D (Visual Depth Perception 1)
Motion/Pursuit Law in 1D (Visual Depth Perception 1)
Keith Stroyan
-
 Vaccinations and Herd Immunity Using the SIR Disease Epidemic Model
Vaccinations and Herd Immunity Using the SIR Disease Epidemic Model
Keith Stroyan -
Motion/Pursuit Law in 1D (Visual Depth Perception 1)
Keith Stroyan -
 Motion/Pursuit Law on Invariant Circles (Visual Depth Perception 4)
Motion/Pursuit Law on Invariant Circles (Visual Depth Perception 4)
Keith Stroyan -
 Motion/Pursuit Law in 2D (Visual Depth Perception 3)
Motion/Pursuit Law in 2D (Visual Depth Perception 3)
Keith Stroyan -
 SIR Epidemic Dynamics
SIR Epidemic Dynamics
Keith Stroyan -
 Dynamic Approximation of Static Quantities (Visual Depth Perception 14)
Dynamic Approximation of Static Quantities (Visual Depth Perception 14)
Keith Stroyan -
 Motion/Pursuit Ratio and Depth in 2D (Visual Depth Perception 18)
Motion/Pursuit Ratio and Depth in 2D (Visual Depth Perception 18)
Keith Stroyan -
Motion Parallax versus Depth, 3D (Visual Depth Perception 13)
Keith Stroyan -
Motion Parallax versus Depth, 2D (Visual Depth Perception 12)
Keith Stroyan -
Tracking and Separation (Visual Depth Perception 11)
Keith Stroyan -
Disparity, Convergence, and Depth (Visual Depth Perception 10)
Keith Stroyan -
Binocular Disparity versus Depth (Visual Depth Perception 9)
Keith Stroyan -
 Binocular Disparity (Visual Depth Perception 7)
Binocular Disparity (Visual Depth Perception 7)
Keith Stroyan -
Fixation and Distraction (Visual Depth Perception 5)
Keith Stroyan -
 Speed, Pursuit, M/P Ratio, and Depth (Visual Depth Perception 16)
Speed, Pursuit, M/P Ratio, and Depth (Visual Depth Perception 16)
Keith Stroyan -
 Motion/Pursuit Ratio and Depth in 1D (Visual Depth Perception 17)
Motion/Pursuit Ratio and Depth in 1D (Visual Depth Perception 17)
Keith Stroyan -
Speed, Motion, Pursuit, and Depth (Visual Depth Perception 15)
Keith Stroyan -
Vieth-Müller Circles (Visual Depth Perception 8)
Keith Stroyan -
Eye Parameters (Visual Depth Perception 6)
Keith Stroyan -
 Motion, Pursuit, Fixate, and Distractor (Visual Depth Perception 2)
Motion, Pursuit, Fixate, and Distractor (Visual Depth Perception 2)
Keith Stroyan