Controlling Liquid Height within Two Tanks in Series Using a PID Controller
Initializing live version



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
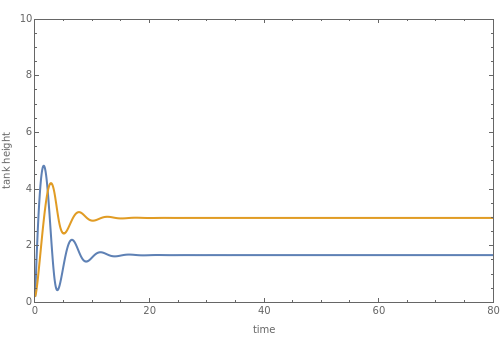
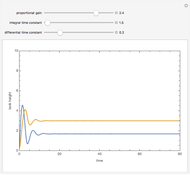
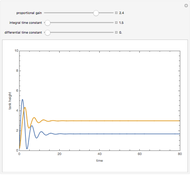
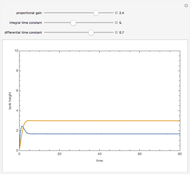
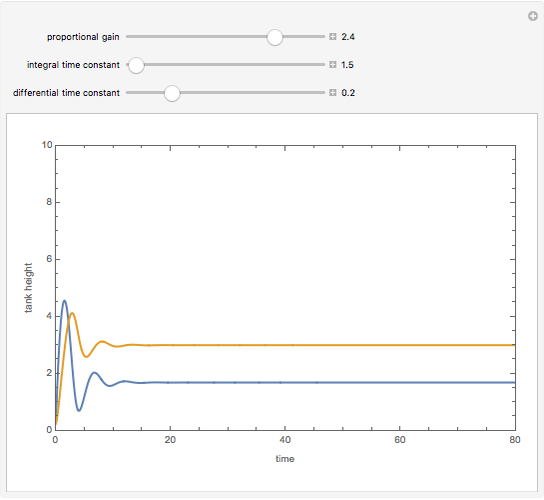
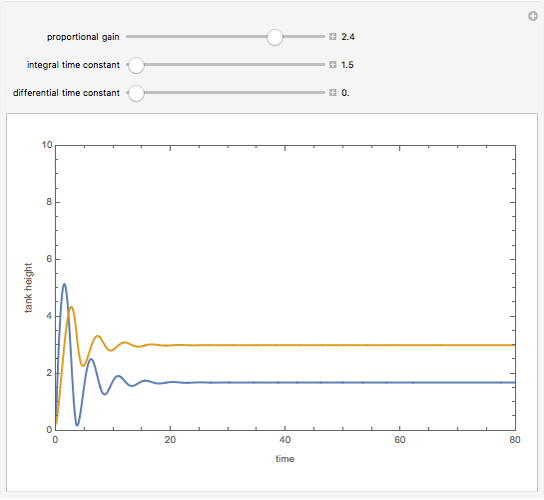
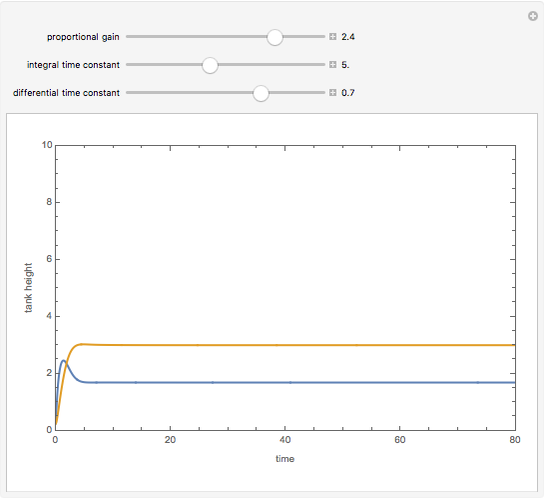
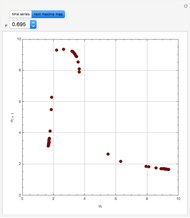
Consider two tanks in series; the dynamic behavior of their heights is governed by the ODEs:
[more]


























Contributed by: Housam Binous (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Permanent Citation
Related Demonstrations
More by Author
 Dynamic Behavior of Heated Tanks in Series
Dynamic Behavior of Heated Tanks in Series
Housam Binous and Ahmed Bellagi Dynamic Behavior of Three Tanks in Series
Dynamic Behavior of Three Tanks in Series
Housam Binous, Brian G. Higgins, and Ahmed Bellagi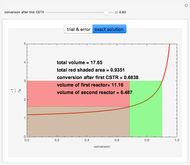 Optimal Setup of Two Continuous Stirred-Tank Reactors (CSTRs) in Series
Optimal Setup of Two Continuous Stirred-Tank Reactors (CSTRs) in Series
Housam Binous Residence Time Distribution for Continuous Stirred-Tank Reactors in Series Using the First Four Moments
Residence Time Distribution for Continuous Stirred-Tank Reactors in Series Using the First Four Moments
Housam Binous and Ahmed Bellagi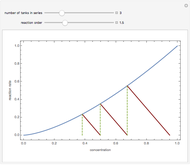 Graphical Method for Evaluating the Performance of N Tanks in Series
Graphical Method for Evaluating the Performance of N Tanks in Series
Housam Binous Impulse Response of Two and Three Continuous Stirred-Tank Reactors in Series: Exact and Approximate Solutions
Impulse Response of Two and Three Continuous Stirred-Tank Reactors in Series: Exact and Approximate Solutions
Housam Binous, Naim Faqir, Eid Al-Mutairi, and Brian G. Higgins Proportional Temperature Control
Proportional Temperature Control
Jeff Bryant E-curve and F-curve for the Tanks-in-Series Model of MacMullin and Weber
E-curve and F-curve for the Tanks-in-Series Model of MacMullin and Weber
Housam Binous High-Pressure Vapor-Liquid Equilibrium Computations Using the Hayden-O'Connell Method and Wilson Model
High-Pressure Vapor-Liquid Equilibrium Computations Using the Hayden-O'Connell Method and Wilson Model
Housam Binous and Eid Al-Mutairi Temperature Control of a Batch Fermentor
Temperature Control of a Batch Fermentor
Housam Binous
-
 Liquid-Liquid Equilibrium for the 1-Butanol-Water System
Liquid-Liquid Equilibrium for the 1-Butanol-Water System
Housam Binous -
 Temperature Dependence of Dehydrogenation of Ethyl Benzene to Styrene
Temperature Dependence of Dehydrogenation of Ethyl Benzene to Styrene
Housam Binous -
 Deconvolution of a Chromatogram
Deconvolution of a Chromatogram
Housam Binous -
 Distribution of Colloidal Particles during Solvent Evaporation
Distribution of Colloidal Particles during Solvent Evaporation
Housam Binous -
 Heat Conduction in a Rod
Heat Conduction in a Rod
Housam Binous -
Optimal Setup of Two Continuous Stirred-Tank Reactors (CSTRs) in Series
Housam Binous -
 Study of the Dynamic Behavior of the Lorenz System
Study of the Dynamic Behavior of the Lorenz System
Housam Binous -
 A Graphically Enhanced Method for Computing Real Roots of Nonlinear Functions
A Graphically Enhanced Method for Computing Real Roots of Nonlinear Functions
Housam Binous -
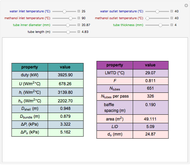 Design of a Shell and Tube Heat Exchanger
Design of a Shell and Tube Heat Exchanger
Housam Binous -
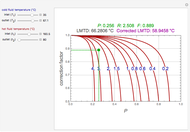 Correction Factor for Shell and Tube Heat Exchanger
Correction Factor for Shell and Tube Heat Exchanger
Housam Binous -
 Contour Plots for Reaction Rates
Contour Plots for Reaction Rates
Housam Binous -
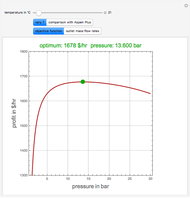 Optimal Conditions for CO2/n-Hexane Flash Separation
Optimal Conditions for CO2/n-Hexane Flash Separation
Housam Binous -
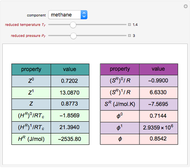
 Residual Functions for the SRK and PR Equations of State
Residual Functions for the SRK and PR Equations of State
Housam Binous -
 Gas-Phase Fugacity Coefficients for Propylene
Gas-Phase Fugacity Coefficients for Propylene
Housam Binous -
 Operation of a Throttling Valve
Operation of a Throttling Valve
Housam Binous -
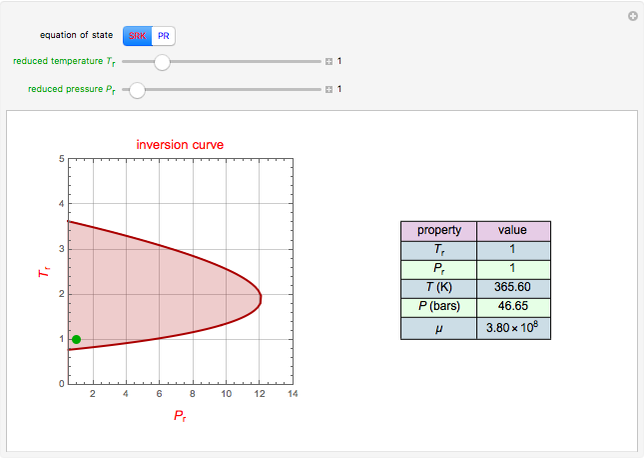 Joule-Thomson Inversion Curves for Soave-Redlich-Kwong (SRK) and Peng-Robinson (PR) Equations of State
Joule-Thomson Inversion Curves for Soave-Redlich-Kwong (SRK) and Peng-Robinson (PR) Equations of State
Housam Binous -
 Lee-Kesler Generalized Correlations for Gases
Lee-Kesler Generalized Correlations for Gases
Housam Binous -
 Mapping the Maxima for a Nonisothermal Chemical System
Mapping the Maxima for a Nonisothermal Chemical System
Housam Binous -
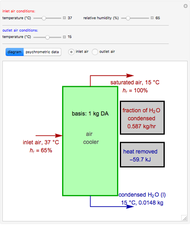 Operation of an Air Conditioner
Operation of an Air Conditioner
Housam Binous -
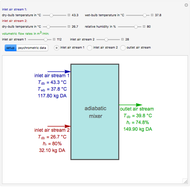 Adiabatic Mixing of Two Moist Air Streams
Adiabatic Mixing of Two Moist Air Streams
Housam Binous