Estimating a Centered Ornstein-Uhlenbeck Process under Measurement Errors





Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
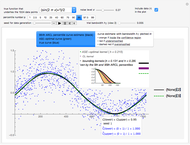
The problem of estimating the two parameters of a stationary process satisfying the differential equation  , where
, where  follows a standard Wiener process, from
follows a standard Wiener process, from  observations at equidistant points of the interval
observations at equidistant points of the interval  , has been well studied. This is also the classical problem of fitting an autoregressive time series of order 1 (AR1), the case " large" yielding the "near unit root" situation. This Demonstration considers the important case where the observations may have additive measurement errors: we assume that these errors are independent, normal random variables with known variance
, has been well studied. This is also the classical problem of fitting an autoregressive time series of order 1 (AR1), the case " large" yielding the "near unit root" situation. This Demonstration considers the important case where the observations may have additive measurement errors: we assume that these errors are independent, normal random variables with known variance  .
.








Contributed by: Didier A. Girard (July 2014)
(CNRS-LJK and Univ. Grenoble Alpes)
Open content licensed under CC BY-NC-SA
Snapshots



Details
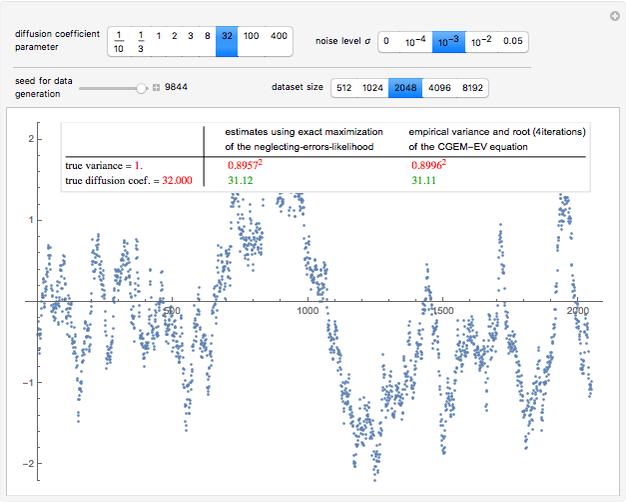
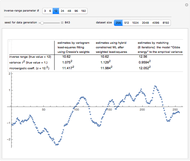
Snapshot 1: Selecting  as the true diffusion coefficient (the value of
as the true diffusion coefficient (the value of  from which the non-noisy data is simulated,
from which the non-noisy data is simulated,  being fixed) and choosing
being fixed) and choosing  , this setting may be thought of as "close" to a case where the noise could be forgotten; this could be confirmed by moving only
, this setting may be thought of as "close" to a case where the noise could be forgotten; this could be confirmed by moving only  from
from  to
to  (the underlying
(the underlying  is then unchanged but the measurement errors are eliminated) and observing that all the estimates are almost unchanged (up to three digits). Concerning the diffusion coefficient, you can observe that the two estimation methods produce very close results. Such closeness is less pronounced for the two estimates of the variance. By changing the seed (and thus a new and new measurement errors used to generate the data) you can be convinced that this is not an accident. Furthermore, a rather large variability, from seed to seed, for the two estimates of the variance is also observed; it is much larger than the variability of the estimates of the diffusion coefficient; notice that this observation is well in agreement with the known theory about the estimation of the variance, the inverse-range parameter, and their product (see [1] and the references therein). By moving from seed to seed, neither of the two methods seems a clear winner in this "small noise" setting. Let us now consider a higher noise level. Another important point to note is that the estimates are not very influenced by the noise perturbing the data, provided the noise level stays lower than
is then unchanged but the measurement errors are eliminated) and observing that all the estimates are almost unchanged (up to three digits). Concerning the diffusion coefficient, you can observe that the two estimation methods produce very close results. Such closeness is less pronounced for the two estimates of the variance. By changing the seed (and thus a new and new measurement errors used to generate the data) you can be convinced that this is not an accident. Furthermore, a rather large variability, from seed to seed, for the two estimates of the variance is also observed; it is much larger than the variability of the estimates of the diffusion coefficient; notice that this observation is well in agreement with the known theory about the estimation of the variance, the inverse-range parameter, and their product (see [1] and the references therein). By moving from seed to seed, neither of the two methods seems a clear winner in this "small noise" setting. Let us now consider a higher noise level. Another important point to note is that the estimates are not very influenced by the noise perturbing the data, provided the noise level stays lower than  . However, by increasing to 0.05, a clear degradation of the neglecting-errors-ML is observed. In contrast, CGEM-EV still produces reasonable estimates of
. However, by increasing to 0.05, a clear degradation of the neglecting-errors-ML is observed. In contrast, CGEM-EV still produces reasonable estimates of  . Here
. Here  ; however, you can change from
; however, you can change from  to
to  and the conclusions remain similar.
and the conclusions remain similar.
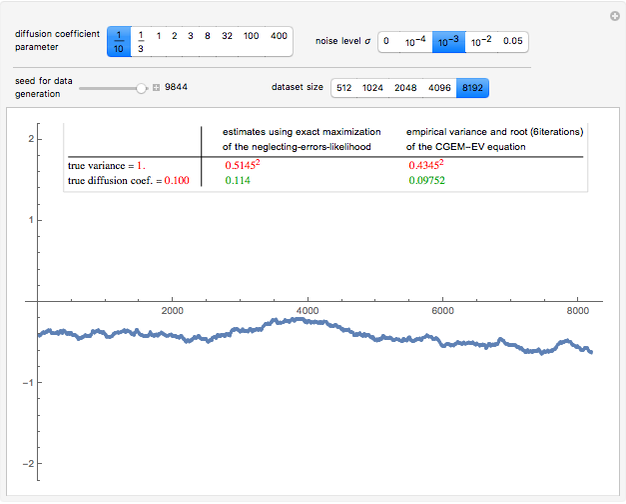
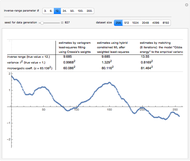
Snapshot 2: Staying at  and selecting
and selecting  as true diffusion coefficient (so that we are close to the "near unit root" situation), a noise with can no longer be considered as a negligible noise. Indeed, we can observe that by diminishing the amplitude of the present noise from to
as true diffusion coefficient (so that we are close to the "near unit root" situation), a noise with can no longer be considered as a negligible noise. Indeed, we can observe that by diminishing the amplitude of the present noise from to  , we restore significantly the quality of the estimates of
, we restore significantly the quality of the estimates of  using neglecting-errors-ML. And by moving from to and trying several seeds, one can be convinced that a noise-to-signal ratio of order or less is required if we want to trust the neglecting-errors-ML estimator (since we can be content with three accurate digits in the estimates). By increasing to 0.05, the neglecting-errors-ML becomes meaningless. In contrast, CGEM-EV still produces reasonable estimates of .
using neglecting-errors-ML. And by moving from to and trying several seeds, one can be convinced that a noise-to-signal ratio of order or less is required if we want to trust the neglecting-errors-ML estimator (since we can be content with three accurate digits in the estimates). By increasing to 0.05, the neglecting-errors-ML becomes meaningless. In contrast, CGEM-EV still produces reasonable estimates of .
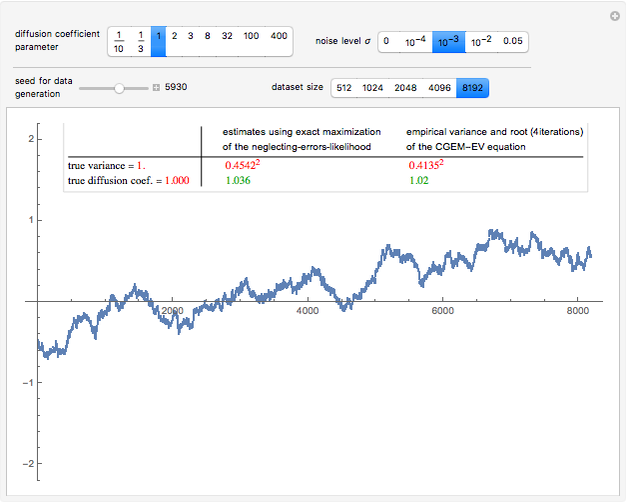
Snapshot 3: Selecting an "intermediate" value  as true diffusion coefficient, similar conclusions can be drawn, except that the approximate upper bound on required to trust the neglecting-errors-ML estimator of seems also intermediate between and .
as true diffusion coefficient, similar conclusions can be drawn, except that the approximate upper bound on required to trust the neglecting-errors-ML estimator of seems also intermediate between and .
References
[1] D. A. Girard, "Asymptotic Near-Efficiency of the 'Gibbs-Energy and Empirical-Variance' Estimating Functions for Fitting Matérn Models to a Dense (Noisy) Series." https://hal.archives-ouvertes.fr/hal-00413693.
[2] A. Gloter and J. Jacod, "Diffusions with Measurements Errors, II-Optimal Estimators," ESAIM-Probability and Statistics, 5, 2001 pp. 243–260.
[3] Y. Zhang, H. Yu, and A. Ian McLeod, "Developments in Maximum Likelihood Unit Root Tests," Communications in Statistics—Simulation and Computation, 42(5), 2013 pp. 1088–1103.
Permanent Citation
 Aliasing in Time Series Analysis
Aliasing in Time Series Analysis
Ian McLeod Distance Distributions in Finite Uniformly Random Point Processes
Distance Distributions in Finite Uniformly Random Point Processes
Sunil Srinivasa and Martin Haenggi Autocorrelation and Partial Autocorrelation Functions of AR(1) Process
Autocorrelation and Partial Autocorrelation Functions of AR(1) Process
Jozef Barunik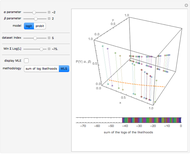 Maximum Likelihood Estimators for Binary Outcomes
Maximum Likelihood Estimators for Binary Outcomes
Seth J. Chandler Kernel Density Estimation
Kernel Density Estimation
Jeff Hamrick Frequency Spectrum of a Noisy Signal
Frequency Spectrum of a Noisy Signal
Jon McLoone Probability in a Communication Channel
Probability in a Communication Channel
Daniel de Souza Carvalho Correlation and Covariance of Random Discrete Signals
Correlation and Covariance of Random Discrete Signals
Daniel de Souza Carvalho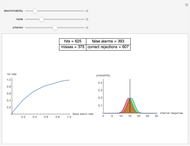 Signal Detection Theory
Signal Detection Theory
Garrett Neske Exploring Measures of Association
Exploring Measures of Association
Jeff Hamrick
-
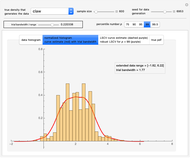 Nonparametric Density Estimation: Robust Cross-Validation Bandwidth Selection via Randomized Choices
Nonparametric Density Estimation: Robust Cross-Validation Bandwidth Selection via Randomized Choices
Didier A. Girard -
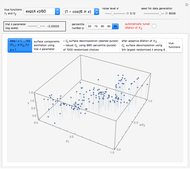 Nonparametric Additive Modeling by Smoothing Splines: Robust Unbiased-Risk-Estimate Selector and a Nonisotropic-Smoothing Improvement
Nonparametric Additive Modeling by Smoothing Splines: Robust Unbiased-Risk-Estimate Selector and a Nonisotropic-Smoothing Improvement
Didier A. Girard -
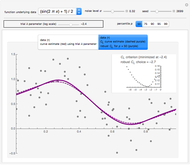 Nonparametric Curve Estimation by Smoothing Splines: Unbiased-Risk-Estimate Selector and its Robust Version via Randomized Choices
Nonparametric Curve Estimation by Smoothing Splines: Unbiased-Risk-Estimate Selector and its Robust Version via Randomized Choices
Didier A. Girard -
 Estimating a Centered Ornstein-Uhlenbeck Process under Measurement Errors
Estimating a Centered Ornstein-Uhlenbeck Process under Measurement Errors
Didier A. Girard -
 Estimating a Centered Matérn (1) Process: Three Alternatives to Maximum Likelihood via Conjugate Gradient Linear Solvers
Estimating a Centered Matérn (1) Process: Three Alternatives to Maximum Likelihood via Conjugate Gradient Linear Solvers
Didier A. Girard -
 Three Alternatives to the Likelihood Maximization for Estimating a Centered Matérn (3/2) Process
Three Alternatives to the Likelihood Maximization for Estimating a Centered Matérn (3/2) Process
Didier A. Girard -
 Nonparametric Regression and Kernel Smoothing: Confidence Regions for the L2-Optimal Curve Estimate
Nonparametric Regression and Kernel Smoothing: Confidence Regions for the L2-Optimal Curve Estimate
Didier A. Girard -
 Nonparametric Curve Estimation by Kernel Smoothers: Efficiency of Unbiased Risk Estimate and GCV Selectors
Nonparametric Curve Estimation by Kernel Smoothers: Efficiency of Unbiased Risk Estimate and GCV Selectors
Didier A. Girard