Inverted Pendulum Controls






Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
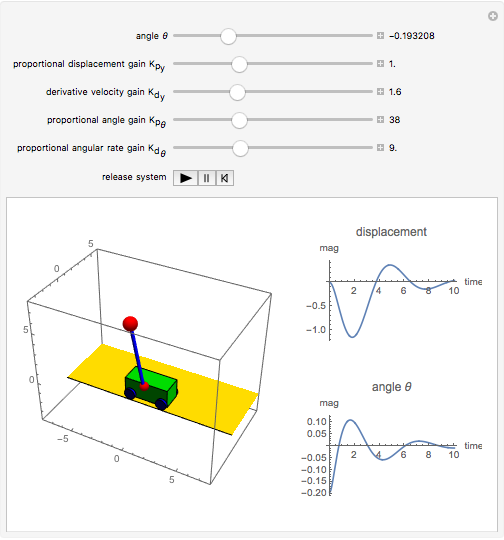
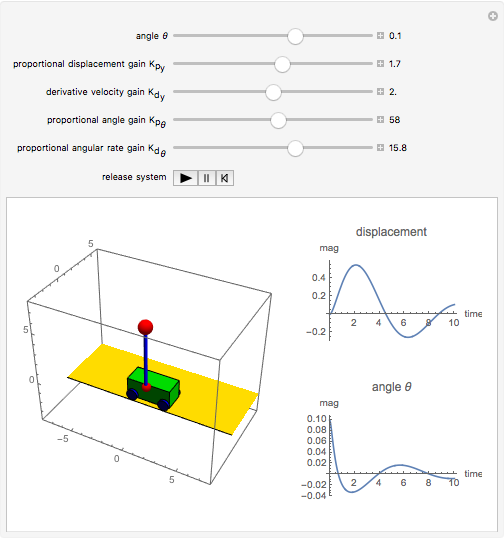
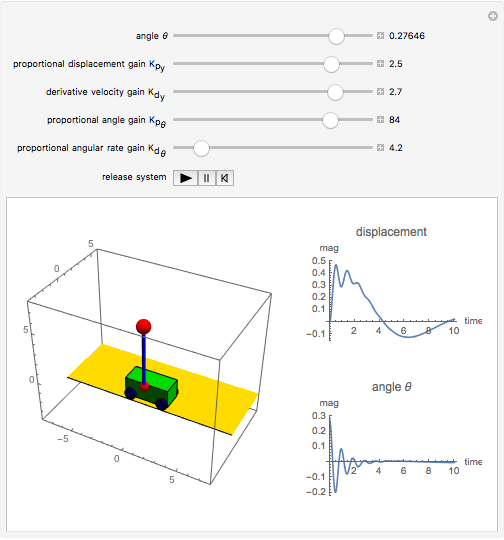
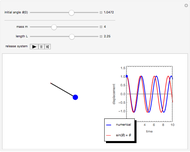
The problem is to move the cart supporting a rod so that the rod does not fall, or—even better—so that the rod stays vertical. This classic problem appears in the control of the Segway invented by Dean Kamen. The solution shown here uses a proportional derivative controller. Other parameters can be examined using this example, but at some point it becomes too complicated for a simple visualization. You can vary several parameters to demonstrate the stability of the device, which can be instructive. The problem includes free body diagrams and variables that can be included in future versions.
Contributed by: Stephen Wilkerson (Towson University) and Nathan Slegers (University of Alabama, Huntsville) with contributions by Franz Brandhuber (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots



Details
Here are the equations used:


Control law:

glossary of terms:
 is the length of the pendulum
is the length of the pendulum
 is the small mass on top of the pendulum
is the small mass on top of the pendulum
 is the mass of the sled
is the mass of the sled
 is the force applied to the sled to keep the pendulum in the vertical position
is the force applied to the sled to keep the pendulum in the vertical position
 is the force on the small mass (here 0)
is the force on the small mass (here 0)
 is the rotation of the pendulum
is the rotation of the pendulum
 is the rotation rate of the pendulum
is the rotation rate of the pendulum
 is the rotational acceleration of the pendulum
is the rotational acceleration of the pendulum
 is the displacement of the sled
is the displacement of the sled
 is the velocity of the sled
is the velocity of the sled
 is the acceleration of the sled
is the acceleration of the sled
 is the acceleration due to gravity
is the acceleration due to gravity
 is the angular damping of inverted pendulum shaft
is the angular damping of inverted pendulum shaft
 is the initial angle of the pendulum
is the initial angle of the pendulum
 is the initial angle rate assumed as zero
is the initial angle rate assumed as zero
 is the initial displacement of the sled assumed at zero
is the initial displacement of the sled assumed at zero
 is the initial velocity of the sled assumed at zero
is the initial velocity of the sled assumed at zero
 is the proportional displacement gain
is the proportional displacement gain
 is the proportional angle gain
is the proportional angle gain
 is the derivative displacement gain
is the derivative displacement gain
 is the derivative angle gain
is the derivative angle gain
Permanent Citation
 Moon Landing Simulation
Moon Landing Simulation
Valeriu Ungureanu and Alexandru Brega First-Order Transfer Functions in Process Control
First-Order Transfer Functions in Process Control
Simon M. Lane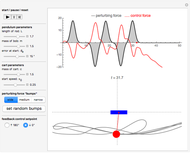 Automatic Feedback Control of a Pendulum-and-Cart System
Automatic Feedback Control of a Pendulum-and-Cart System
Erik Mahieu Proportional Temperature Control
Proportional Temperature Control
Jeff Bryant Simulation of Feedback Control System with Controller and Second-Order Plant
Simulation of Feedback Control System with Controller and Second-Order Plant
Nasser M. Abbasi Step Response with a P Controller
Step Response with a P Controller
Doug Looze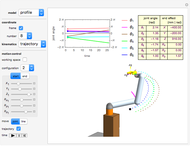 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu First- and Second-Order Transfer Functions
First- and Second-Order Transfer Functions
Rachael L. Baumann and Adam J. Johnston Active Shock Absorbers
Active Shock Absorbers
Enrique Zeleny Quarter-Car Suspension Model with Double Spring
Quarter-Car Suspension Model with Double Spring
Jon Neades
-
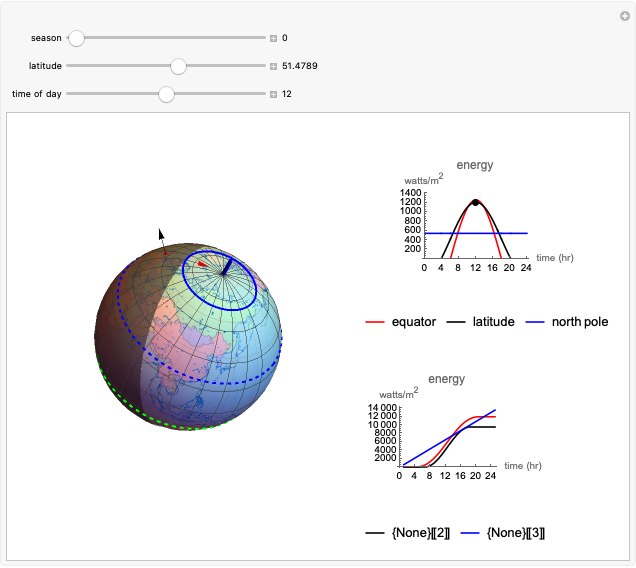 Solar Energy Incident on Earth's Surface
Solar Energy Incident on Earth's Surface
Stephen Wilkerson -
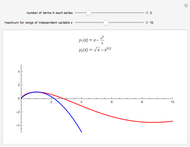 Series Solution of a Cauchy-Euler Equation
Series Solution of a Cauchy-Euler Equation
Stephen Wilkerson -
 Volumes of Revolution Using Cylindrical Shells
Volumes of Revolution Using Cylindrical Shells
Stephen Wilkerson -
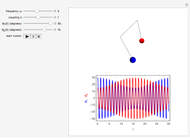 Dynamics of Coupled Pendulums
Dynamics of Coupled Pendulums
Stephen Wilkerson -
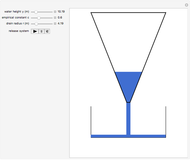 Torricelli's Law for Tank Draining
Torricelli's Law for Tank Draining
Stephen Wilkerson -
 Area between Curves
Area between Curves
Stephen Wilkerson -
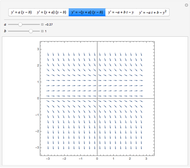 Direction Fields for Differential Equations
Direction Fields for Differential Equations
Stephen Wilkerson -
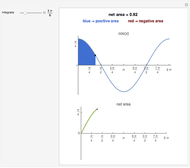 Fundamental Theorem of Calculus
Fundamental Theorem of Calculus
Stephen Wilkerson -
 Heat Transfer along a Rod
Heat Transfer along a Rod
Stephen Wilkerson -
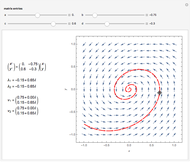
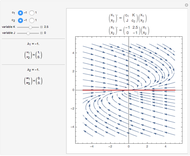 Phase Portraits, Eigenvectors, and Eigenvalues
Phase Portraits, Eigenvectors, and Eigenvalues
Stephen Wilkerson -
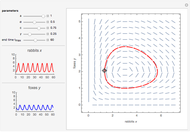 Predator-Prey Model
Predator-Prey Model
Stephen Wilkerson -
 An Oscillating Pendulum
An Oscillating Pendulum
Stephen Wilkerson -
 Homogeneous Linear System of Coupled Differential Equations
Homogeneous Linear System of Coupled Differential Equations
Stephen Wilkerson -
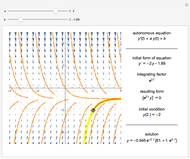 Using an Integrating Factor to Solve a Separable Equation
Using an Integrating Factor to Solve a Separable Equation
Stephen Wilkerson -
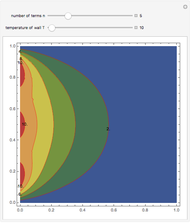 Gibbs Phenomenon in Laplace's Equation for Heat Transfer
Gibbs Phenomenon in Laplace's Equation for Heat Transfer
Stephen Wilkerson -
 Boundary Value Problem Using Series of Bessel Functions
Boundary Value Problem Using Series of Bessel Functions
Stephen Wilkerson -
 Mass Oscillating between a Spring and a Damper
Mass Oscillating between a Spring and a Damper
Stephen Wilkerson -
 Using Eigenvalues to Solve a First-Order System of Two Coupled Differential Equations
Using Eigenvalues to Solve a First-Order System of Two Coupled Differential Equations
Stephen Wilkerson -
 Two Masses with Forcing Functions Oscillating between Three Springs
Two Masses with Forcing Functions Oscillating between Three Springs
Stephen Wilkerson -
 Differential Equation with a Discontinuous Forcing Function
Differential Equation with a Discontinuous Forcing Function
Stephen Wilkerson