Probabilistic Roadmap Method for Robot Arm



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
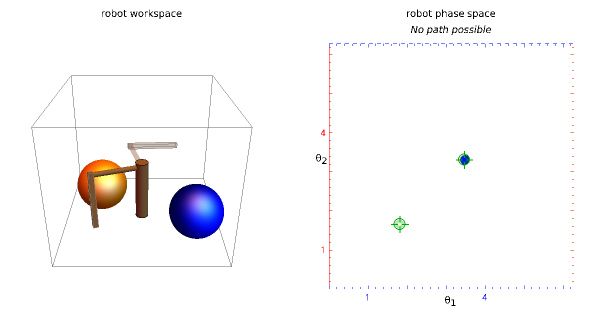
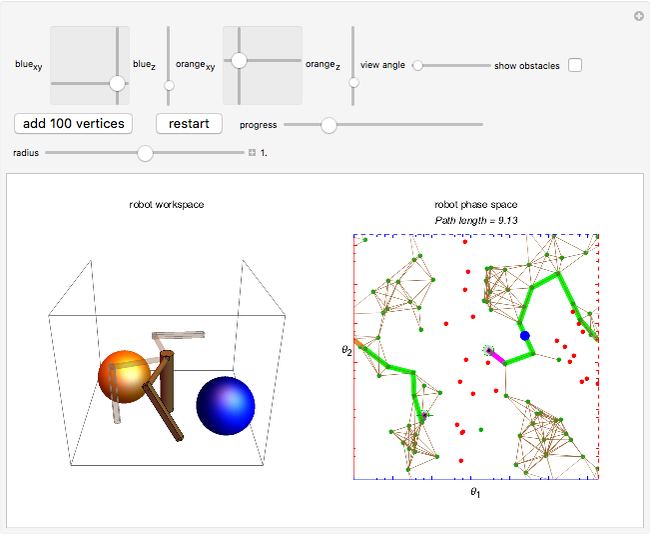
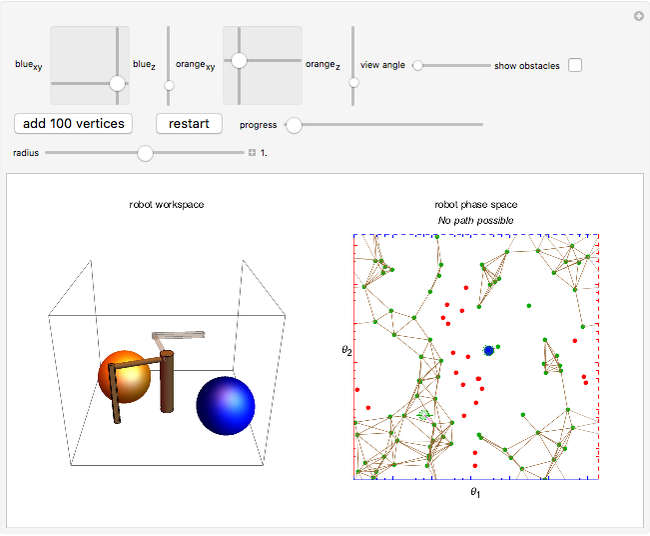
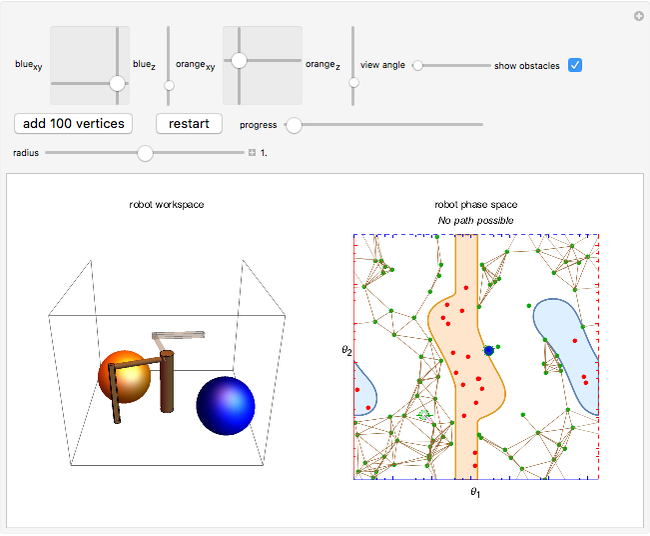
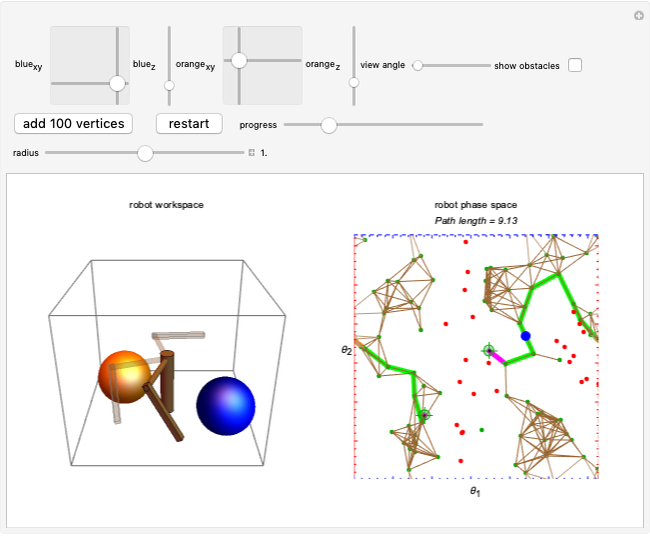
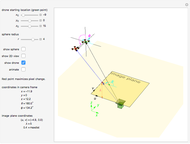
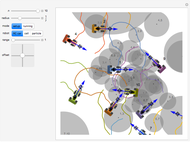
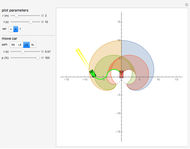
This Demonstration uses the Probabilistic Roadmap Method (PRM) to plan a motion path for a two-link robot that avoids collisions with a blue sphere and an orange sphere. First, click "add 100 vertices" to randomly sample configurations and calculate if they collide with obstacles (red points) or are safe (green points). Next, select "radius" value to try to connect safe vertices less than radius distance apart into a roadmap. If a path from the initial to goal configuration is found, it can be traversed with the "progress" slider. Although the PRM does not need to calculate the configuration space obstacles, you can make them visible with a checkbox.
Contributed by: Aaron T. Becker and Yitong Lu (January 2020)
Open content licensed under CC BY-NC-SA
Details
The goal of robot motion planning is to find a continuous path from an initial configuration to a goal configuration that is collision free. A configuration is a complete specification of every point of the robot. This Demonstration uses a two-link robot with two rotational joints that can each rotate from 0 to 2 . The resulting configuration space can be represented as a toroid, and so wraps from 2
. The resulting configuration space can be represented as a toroid, and so wraps from 2 to 0 on the edges of the plot shown. Obstacles in the robot's workspace map to obstacle regions in the configuration space, but computing these regions is computationally expensive.
to 0 on the edges of the plot shown. Obstacles in the robot's workspace map to obstacle regions in the configuration space, but computing these regions is computationally expensive.
Changing the obstacle positions requires rebuilding the roadmap. Longer radius values require more computation but result in a denser roadmap and shorter paths.
PRM was developed in 1996 by Lydia Kavraki et al. [1]. PRMs generate a roadmap that can be reused for subsequent motion-planning queries. PRM was designed for high-dimension configuration spaces (dimensions of 5 or more), but this Demonstration uses two dimensions for ease of visualization.
[1] L. E. Kavraki, P. Svestka, J-C. Latombe and Mark H. Overmars. "Probabilistic Roadmaps for Path Planning in High-Dimensional Configuration Spaces." IEEE Transactions on Robotics and Automation, 12(4), 1996 pp. 566–580. doi:10.1109/70.508439.
Snapshots

Permanent Citation
 Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan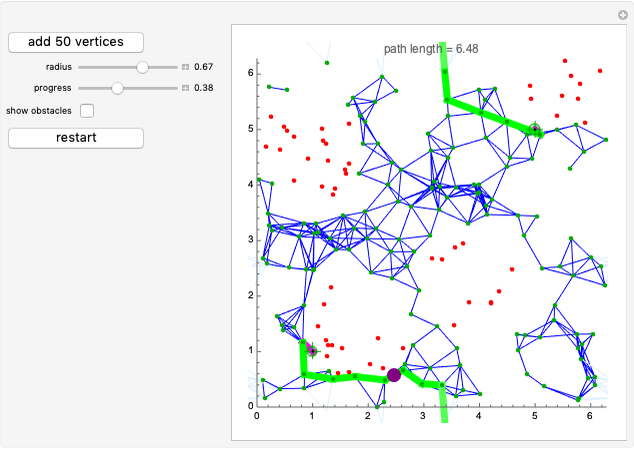 Probabilistic Roadmap Method
Probabilistic Roadmap Method
Aaron T. Becker and Yitong Lu Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker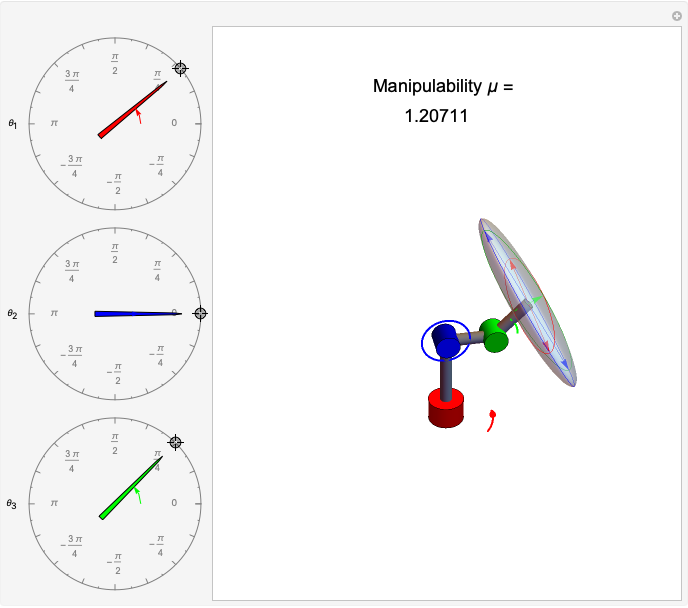 Manipulability Ellipsoid of a Robot Arm
Manipulability Ellipsoid of a Robot Arm
Aaron T. Becker and Mary Burbage Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao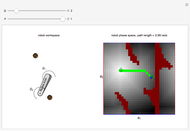 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala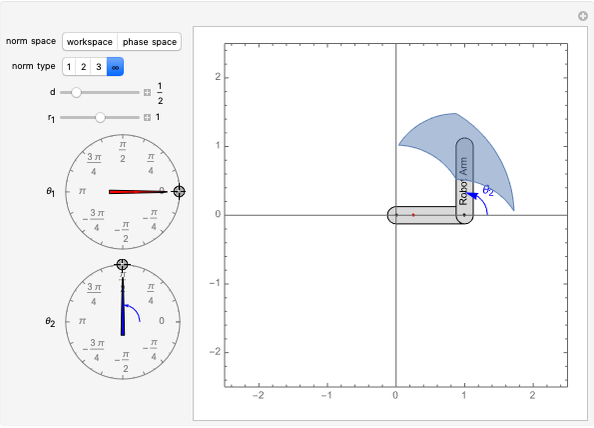 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker and Benedict Isichei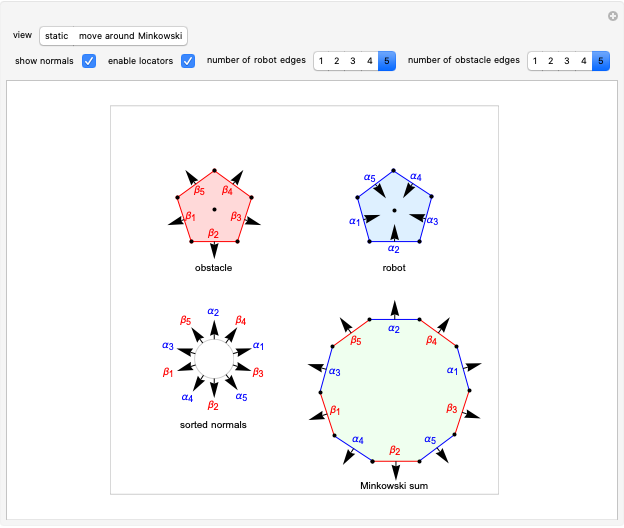 Minkowski Sum of Convex Robot and Obstacle
Minkowski Sum of Convex Robot and Obstacle
Shreyas Poyrekar, Arifa Sultana and Aaron T. Becker Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati Denavit-Hartenberg Parameters for a Three-Link Robot
Denavit-Hartenberg Parameters for a Three-Link Robot
Aaron T. Becker and Mary Burbage
-
 Probabilistic Roadmap Method for Robot Arm
Probabilistic Roadmap Method for Robot Arm
Aaron T. Becker -
Probabilistic Roadmap Method
Aaron T. Becker -
Robot Manipulator Workspaces
Aaron T. Becker -
 Reachable Set for a Drone
Reachable Set for a Drone
Aaron T. Becker -
 Smallest Circle Problem
Smallest Circle Problem
Aaron T. Becker -
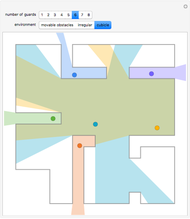 Art Gallery Problem
Art Gallery Problem
Aaron T. Becker -
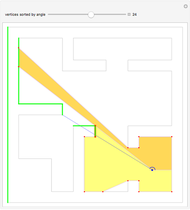 Visibility Region of a Polygon
Visibility Region of a Polygon
Aaron T. Becker -
Minkowski Sum of Convex Robot and Obstacle
Aaron T. Becker -
 Maximizing Apparent Velocity in a Camera's Frame
Maximizing Apparent Velocity in a Camera's Frame
Aaron T. Becker -
 Steering Multiple Radio Control (RC) Cars with One Joystick
Steering Multiple Radio Control (RC) Cars with One Joystick
Aaron T. Becker -
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker -
 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker -
 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker -
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker