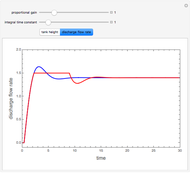
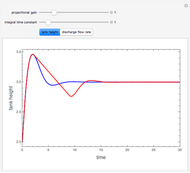
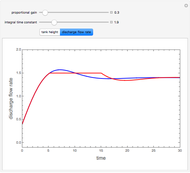
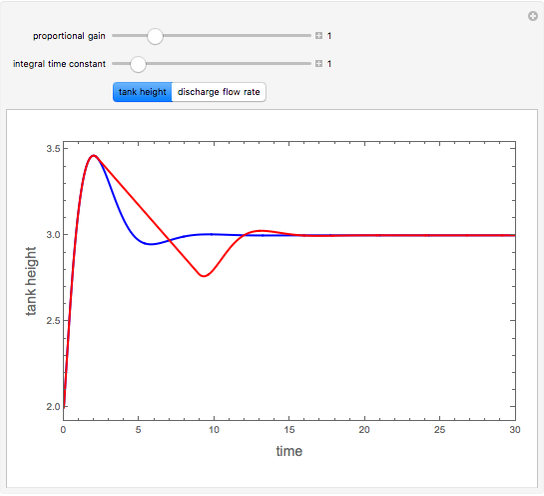
Proportional-Integral-Derivative (PID) Control of a Tank Level with Anti-Windup
Initializing live version




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
The dynamic behavior of a tank of height  (in meters) is governed by the following ODE:
(in meters) is governed by the following ODE:















Contributed by: Housam Binous and Ahmed Bellagi (January 2013)
Open content licensed under CC BY-NC-SA
Snapshots


Details
Permanent Citation
Related Demonstrations
More by Author
 Laboratory Waterbath with Proportional Control
Laboratory Waterbath with Proportional Control
Benson R. Sundheim Optimal Control of a Continuous Stirred-Tank Reactor
Optimal Control of a Continuous Stirred-Tank Reactor
Housam Binous and Ahmed Bellagi Diffusion-Controlled Evaporation of an Aerosol Droplet
Diffusion-Controlled Evaporation of an Aerosol Droplet
Brian G. Higgins and Housam Binous Dynamics of a Heated Tank with Proportional Integral Differential (PID) Control and Outlet Flow Time Delay
Dynamics of a Heated Tank with Proportional Integral Differential (PID) Control and Outlet Flow Time Delay
Clay Gruesbeck Tank Equilibria
Tank Equilibria
Michael Schreiber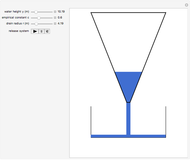 Torricelli's Law for Tank Draining
Torricelli's Law for Tank Draining
Stephen Wilkerson and Mark Evans (Towson University)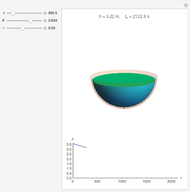 Drainage of a Hemispherical Tank
Drainage of a Hemispherical Tank
Enrique Zeleny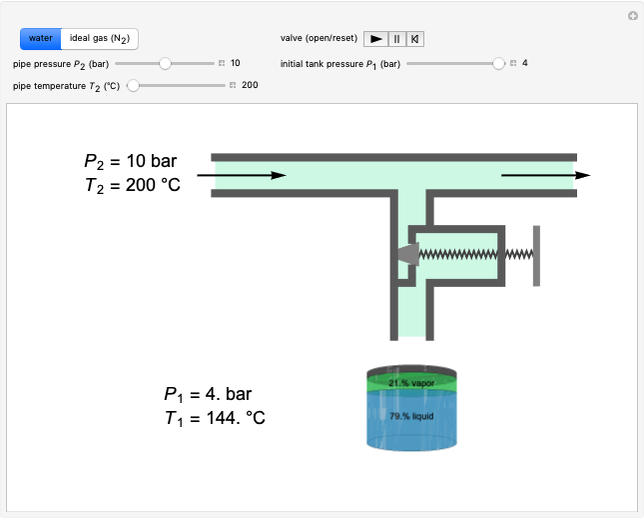 Energy Balance on Pressurizing a Tank
Energy Balance on Pressurizing a Tank
Rachael L. Baumann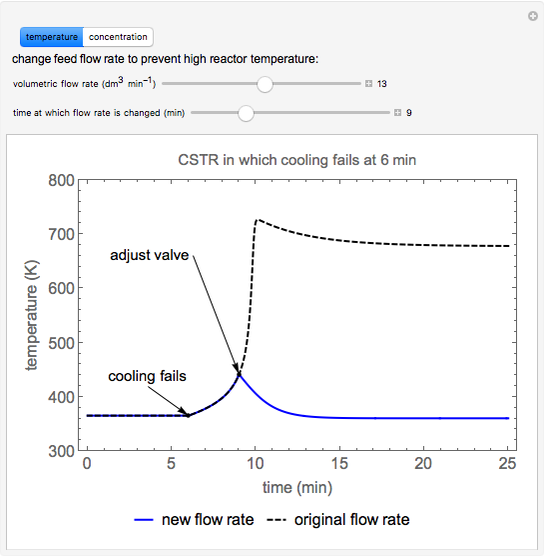 Continuous Stirred-Tank Reactor That Loses Cooling
Continuous Stirred-Tank Reactor That Loses Cooling
Rachael L. Baumann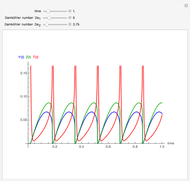 Chaos in a Continuous Stirred Tank Reactor
Chaos in a Continuous Stirred Tank Reactor
Clay Gruesbeck
-
 Liquid-Liquid Equilibrium for the 1-Butanol-Water System
Liquid-Liquid Equilibrium for the 1-Butanol-Water System
Ahmed Bellagi -
 Temperature Dependence of Dehydrogenation of Ethyl Benzene to Styrene
Temperature Dependence of Dehydrogenation of Ethyl Benzene to Styrene
Ahmed Bellagi -
 Deconvolution of a Chromatogram
Deconvolution of a Chromatogram
Ahmed Bellagi -
 Design of a Shell and Tube Heat Exchanger
Design of a Shell and Tube Heat Exchanger
Ahmed Bellagi -
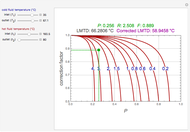 Correction Factor for Shell and Tube Heat Exchanger
Correction Factor for Shell and Tube Heat Exchanger
Ahmed Bellagi -
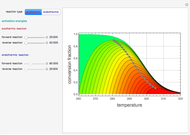 Contour Plots for Reaction Rates
Contour Plots for Reaction Rates
Ahmed Bellagi -
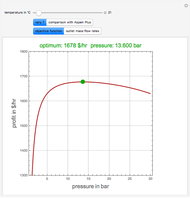 Optimal Conditions for CO2/n-Hexane Flash Separation
Optimal Conditions for CO2/n-Hexane Flash Separation
Ahmed Bellagi -
 Residual Functions for the SRK and PR Equations of State
Residual Functions for the SRK and PR Equations of State
Ahmed Bellagi -
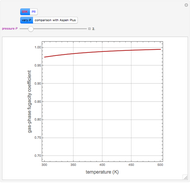 Gas-Phase Fugacity Coefficients for Propylene
Gas-Phase Fugacity Coefficients for Propylene
Ahmed Bellagi -
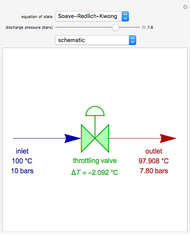 Operation of a Throttling Valve
Operation of a Throttling Valve
Ahmed Bellagi -
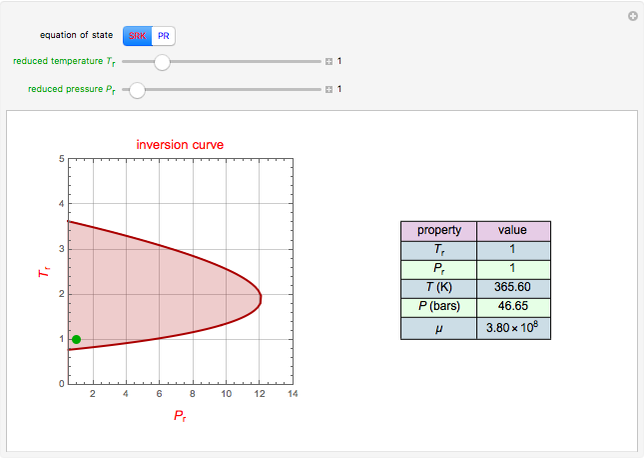 Joule-Thomson Inversion Curves for Soave-Redlich-Kwong (SRK) and Peng-Robinson (PR) Equations of State
Joule-Thomson Inversion Curves for Soave-Redlich-Kwong (SRK) and Peng-Robinson (PR) Equations of State
Ahmed Bellagi -
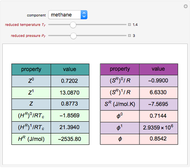 Lee-Kesler Generalized Correlations for Gases
Lee-Kesler Generalized Correlations for Gases
Ahmed Bellagi -
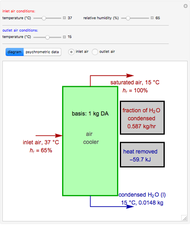 Operation of an Air Conditioner
Operation of an Air Conditioner
Ahmed Bellagi -
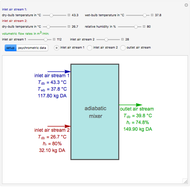 Adiabatic Mixing of Two Moist Air Streams
Adiabatic Mixing of Two Moist Air Streams
Ahmed Bellagi -
 Adiabatic Humidification
Adiabatic Humidification
Ahmed Bellagi -
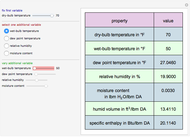 Psychrometric Data Calculator in English Engineering Units
Psychrometric Data Calculator in English Engineering Units
Ahmed Bellagi -
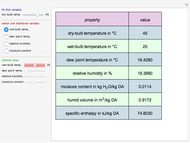 Psychrometric Data Calculator in SI Units
Psychrometric Data Calculator in SI Units
Ahmed Bellagi -
 Concentration of Sugar Solution in a Bubble Column
Concentration of Sugar Solution in a Bubble Column
Ahmed Bellagi -
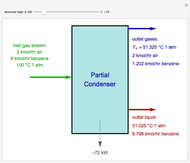 Operation of a Partial Condenser
Operation of a Partial Condenser
Ahmed Bellagi -
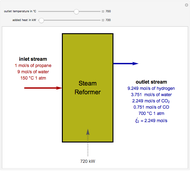 Steam Reforming of Propane
Steam Reforming of Propane
Ahmed Bellagi