A Contact Element in Rheological Models








Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
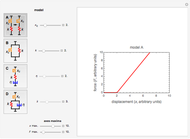
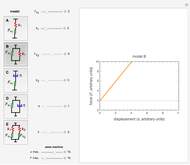
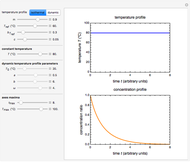
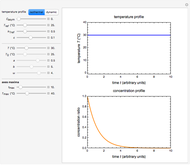
When combined with the traditional elastic and viscous elements, the contact element can describe rheological behaviors characterized by delayed activation. The contact element itself is engaged when the displacement reaches a defined level, which activates the elements with which it is connected. This Demonstration plots the force-displacement curves of simple mechanical analogs composed of a spring, dashpot, and contact element to illustrate the operation of the contact element.
Contributed by: Mark D. Normand and Micha Peleg (October 2013)
Open content licensed under CC BY-NC-SA
Snapshots


Details
Incorporating a contact element in a mechanical analog composed of springs and dashpots can be used to model viscoelastic behavior characterized by delayed activation of the whole or part of the model array. The contact element is defined by: if  , then
, then  , else
, else  , where
, where  is the displacement in arbitrary length units and
is the displacement in arbitrary length units and  the displacement at which the element is engaged.
the displacement at which the element is engaged.
In an in-series combination of the contact element and a spring (model A) the array's definition is: if  , then
, then  , else
, else  , where
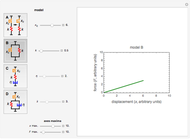
, where  is the spring's constant. In a parallel combination with a spring (model B) the array's definition is: if
is the spring's constant. In a parallel combination with a spring (model B) the array's definition is: if  ,
,  , else
, else  .
.
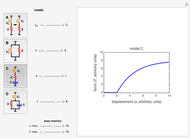
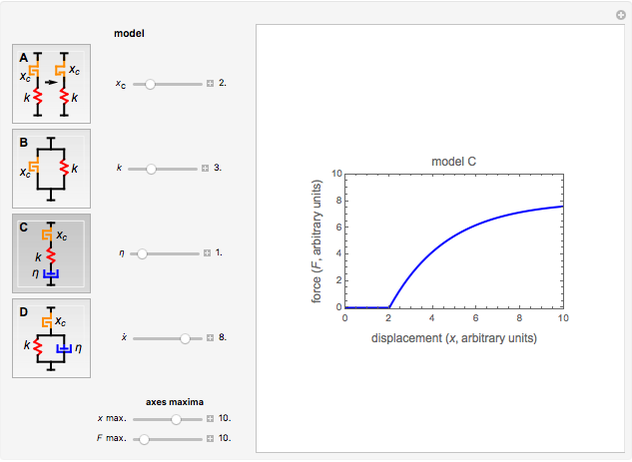
In an in-series combination of the contact element, a spring,  , and a dashpot, η, that is, a Maxwell element (model C), the array's definition is: if
, and a dashpot, η, that is, a Maxwell element (model C), the array's definition is: if  ,
,  , else
, else  , where
, where  is the displacement rate and
is the displacement rate and  . If the contact element is placed in series with a spring and dashpot themselves in a parallel combination, that is, a Kelvin–Voigt element (model D), the array's definition is: if
. If the contact element is placed in series with a spring and dashpot themselves in a parallel combination, that is, a Kelvin–Voigt element (model D), the array's definition is: if  ,
,  , else
, else  .
.
Notice that in model A, when  , the resulting plot is of an ordinary spring. In model B, this happens as
, the resulting plot is of an ordinary spring. In model B, this happens as  . In model C, setting
. In model C, setting  produces the force-displacement curve of an ordinary Maxwell element and in model D of an ordinary Kelvin–Voigt element.
produces the force-displacement curve of an ordinary Maxwell element and in model D of an ordinary Kelvin–Voigt element.
You can choose the model A, B, C, or D by clicking its setter; then enter the values of  ,
,  , η, and
, η, and  with sliders to plot the corresponding force-displacement curve. You can also enter plot's force and displacement maximum values with sliders.
with sliders to plot the corresponding force-displacement curve. You can also enter plot's force and displacement maximum values with sliders.
Permanent Citation
 A Sliding Element in Rheological Models
A Sliding Element in Rheological Models
Mark D. Normand and Micha Peleg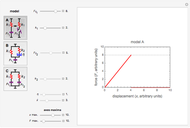 Fracture Element in Rheological Models
Fracture Element in Rheological Models
Mark D. Normand and Micha Peleg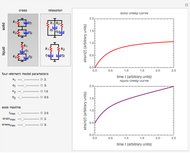 Creep and Stress Relaxation for Four-Element Viscoelastic Solids and Liquids
Creep and Stress Relaxation for Four-Element Viscoelastic Solids and Liquids
Mark D. Normand and Micha Peleg Principal Stresses in Compacted Cohesive Powders
Principal Stresses in Compacted Cohesive Powders
Mark D. Normand and Micha Peleg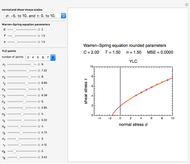 Estimating Cohesion and Tensile Strength of Compacted Powders
Estimating Cohesion and Tensile Strength of Compacted Powders
Mark D. Normand and Micha Peleg A Model for Monomer and Micellar Concentrations in Surfactant Solutions
A Model for Monomer and Micellar Concentrations in Surfactant Solutions
Wajih Al-Soufi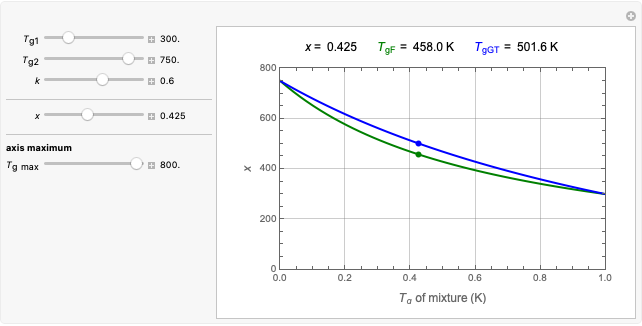 Gordon-Taylor and Fox Equations for Glass Transition Temperature
Gordon-Taylor and Fox Equations for Glass Transition Temperature
Mark D. Normand and Micha Peleg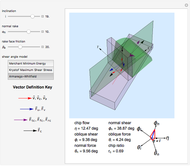 Shear-Angle Models for Oblique Metal Cutting
Shear-Angle Models for Oblique Metal Cutting
Raja Kountanya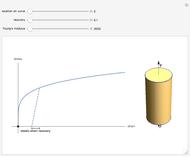 Elastic Recovery after Plastic Deformation of Metals
Elastic Recovery after Plastic Deformation of Metals
Ivy Huang Elasticity of Shear
Elasticity of Shear
Enrique Zeleny
-
Gordon-Taylor and Fox Equations for Glass Transition Temperature
Micha Peleg -
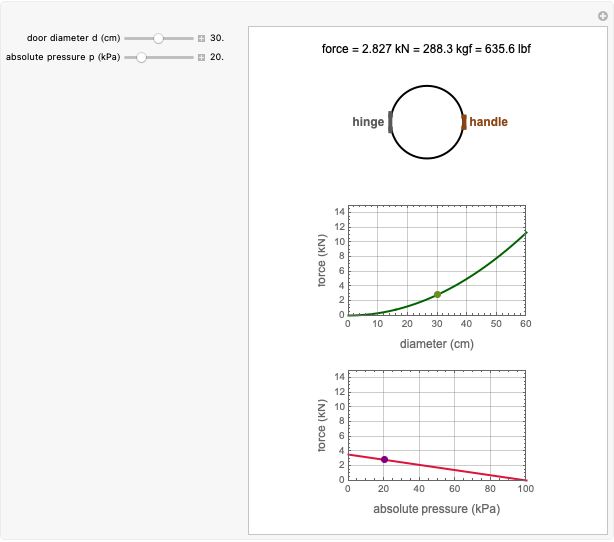 Force to Overcome Vacuum Pull
Force to Overcome Vacuum Pull
Micha Peleg -
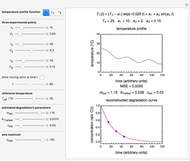
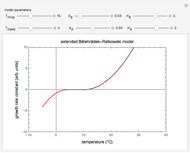 Extending the Square Root Growth Rate Model to Lethal Low Temperatures
Extending the Square Root Growth Rate Model to Lethal Low Temperatures
Micha Peleg -
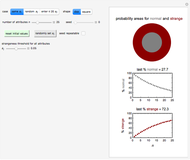 Probability of Being Strange According to Paulos
Probability of Being Strange According to Paulos
Micha Peleg -
 Successive Three-Point Method for Weibullian Chemical Degradation
Successive Three-Point Method for Weibullian Chemical Degradation
Micha Peleg -
Estimating Cohesion and Tensile Strength of Compacted Powders
Micha Peleg -
 Three-Endpoints Method for Isothermal Weibullian Chemical Degradation
Three-Endpoints Method for Isothermal Weibullian Chemical Degradation
Micha Peleg -
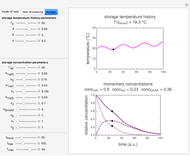 Vitamin C Loss in Foods During Heat Processing and Storage
Vitamin C Loss in Foods During Heat Processing and Storage
Micha Peleg -
 Parameterizing Temperature-Viscosity Relations
Parameterizing Temperature-Viscosity Relations
Micha Peleg -
 Laplace Distribution in Fluctuating Stock Index Records
Laplace Distribution in Fluctuating Stock Index Records
Micha Peleg -
 Weibullian Chemical Degradation
Weibullian Chemical Degradation
Micha Peleg -
 Simulating Ascorbic Acid Degradation
Simulating Ascorbic Acid Degradation
Micha Peleg -
 Additive and Multiplicative Risks
Additive and Multiplicative Risks
Micha Peleg -
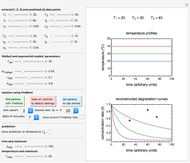
 Endpoints Method for Predicting Chemical Degradation in Frozen Foods
Endpoints Method for Predicting Chemical Degradation in Frozen Foods
Micha Peleg -
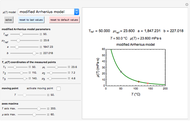
 Exponential Model for Arrhenius Activation Energy
Exponential Model for Arrhenius Activation Energy
Micha Peleg -
 Prediction of Isothermal Degradation by the Endpoints Method
Prediction of Isothermal Degradation by the Endpoints Method
Micha Peleg -
 Risk Guesstimation from Factor Ranges
Risk Guesstimation from Factor Ranges
Micha Peleg -
 Volatiles Formation Kinetics in Stored Fish
Volatiles Formation Kinetics in Stored Fish
Micha Peleg -
 Comparison of Six Sigmoid Growth Curve Models
Comparison of Six Sigmoid Growth Curve Models
Micha Peleg -
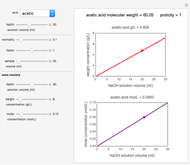 Titration of Common Food Acids
Titration of Common Food Acids
Micha Peleg