Model of an Industrial Robot Arm




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
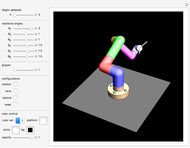
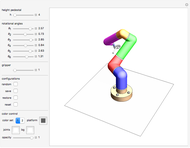
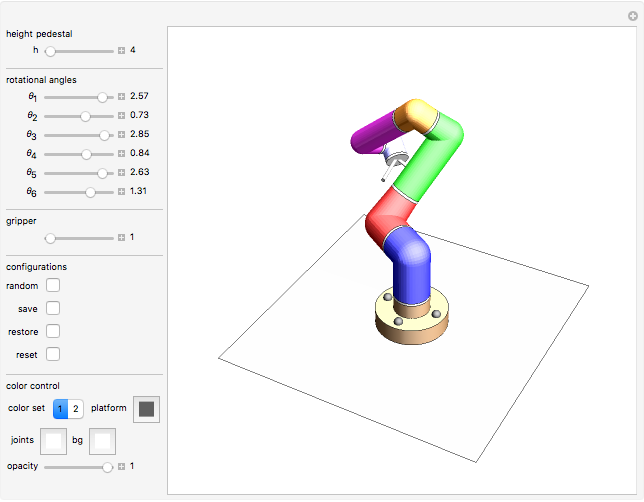
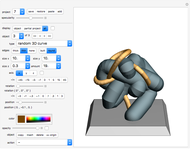
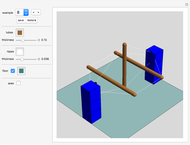
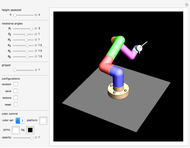
This Demonstration simulates the operation of a robot arm modeled after a real industrial machine. There are nine degrees of freedom: lifting the arm, seven rotations and one gripper. The model applies the equations of forward kinematics to represent the results of manipulation of the seven rotation angles.
Contributed by: Karl Scherer (May 2015)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Controls
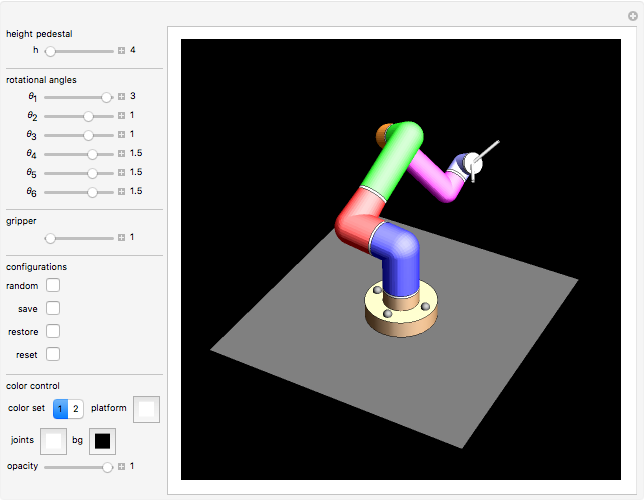
In this Demonstration you can vary the height of the brown pedestal, but in reality the height of this pedestal is usually fixed and the pedestal firmly bolted to the ground.
Move the seven angle sliders to control the various parts of the robot arm.
Use the gripper slider to open and close the gripper to various degrees.
"color set"
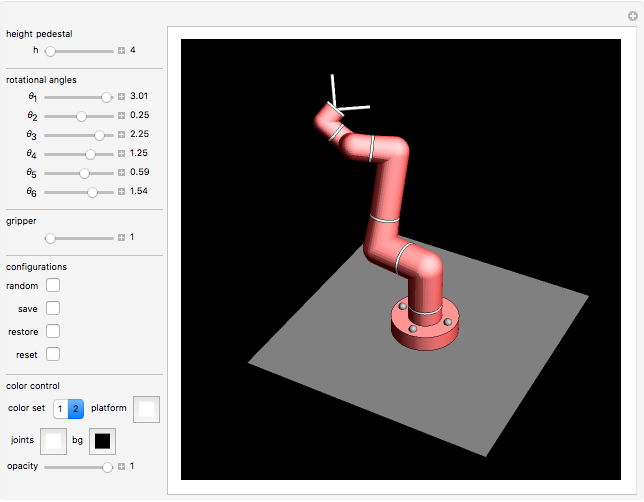
For the parts of the arms, you can choose one of two given sets of colors.
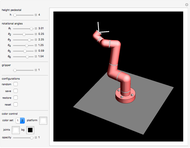
"opacity"
Move the opacity slider to make the structure transparent.
"platform"
Here you control the color of the square platform the robot arm stands on. The platform is half-transparent.
"joints"
The gray square platform the robot arm stands on will always be half-transparent.
"bg"
Controls the background color.
"store"
Click the store button to store the currrent arm configuration.
"res"
Click the restore button to restore the stored arm configuration.
"rnd"
Click the randomising button to let the system select a random position of the robot arm.
"reset"
Click the reset button to reset the robot arm to its default position.
Arm thinning
Limitations
This model does not check for intersection with itself.
Security for humans
When a robot arm has to work side-by-side with humans, safety is paramount, so a real robot arm might have sensors such as "elbow patches" on each part that might make contact with humans or other machines. These patches are not displayed here.
Technical notes
The programming code used is extremely simple and hence can be easily used to describe the control of similar robot arms via rotations of joints.
Permanent Citation
"Model of an Industrial Robot Arm"
http://demonstrations.wolfram.com/ModelOfAnIndustrialRobotArm/
Wolfram Demonstrations Project
Published: May 13 2015
 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Motions of a Hexapod Robot
Motions of a Hexapod Robot
Jim Fowler Hand Model
Hand Model
Sándor Kabai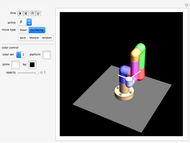 Animated Model of an Industrial Robot Arm
Animated Model of an Industrial Robot Arm
Karl Scherer Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan Jansen Walker
Jansen Walker
Karl Scherer Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker Surveyor-Hunveyor Tripod
Surveyor-Hunveyor Tripod
Sándor Kabai and Szaniszló Bérczi Luna Landers on the Moon
Luna Landers on the Moon
Sándor Kabai and Szaniszló Bérczi
-
 Polyhedral Playground
Polyhedral Playground
Karl Scherer -
 Tiling Constructor, Tile-Dragging Variant
Tiling Constructor, Tile-Dragging Variant
Karl Scherer -
 The Catenax Puzzle
The Catenax Puzzle
Karl Scherer -
 Angel Puzzle
Angel Puzzle
Karl Scherer -
 Constructing and Manipulating Graphs
Constructing and Manipulating Graphs
Karl Scherer -
 3D Construction Set
3D Construction Set
Karl Scherer -
 Blended Quadrilaterals
Blended Quadrilaterals
Karl Scherer -
 Rotating Polyhedra in Space
Rotating Polyhedra in Space
Karl Scherer -
 The Misdirection Game
The Misdirection Game
Karl Scherer -
 Tensegrity
Tensegrity
Karl Scherer -
 Nowhere-Neat Tilings
Nowhere-Neat Tilings
Karl Scherer -
 Pocket Calculator
Pocket Calculator
Karl Scherer -
 Area Puzzle
Area Puzzle
Karl Scherer -
 Molecule Construction Set
Molecule Construction Set
Karl Scherer -
 The Ray Puzzle
The Ray Puzzle
Karl Scherer -
Animated Model of an Industrial Robot Arm
Karl Scherer -
 Model of an Industrial Robot Arm
Model of an Industrial Robot Arm
Karl Scherer -
 Color-Blended Circular Tiles
Color-Blended Circular Tiles
Karl Scherer -
 Rep-Tiles
Rep-Tiles
Karl Scherer -
 Armed Balloons Puzzle
Armed Balloons Puzzle
Karl Scherer