Probabilistic Roadmap Method with Seven-Link Articulated Robot


Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
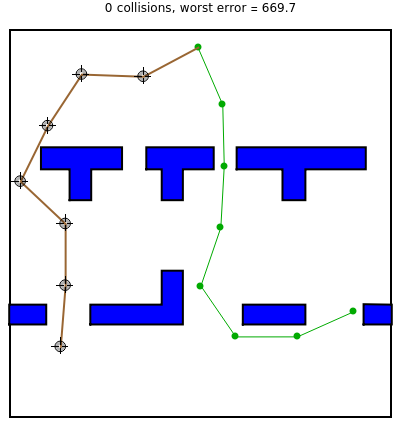
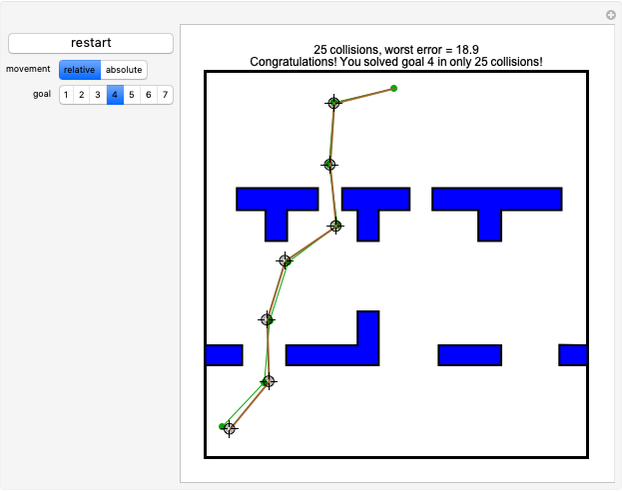
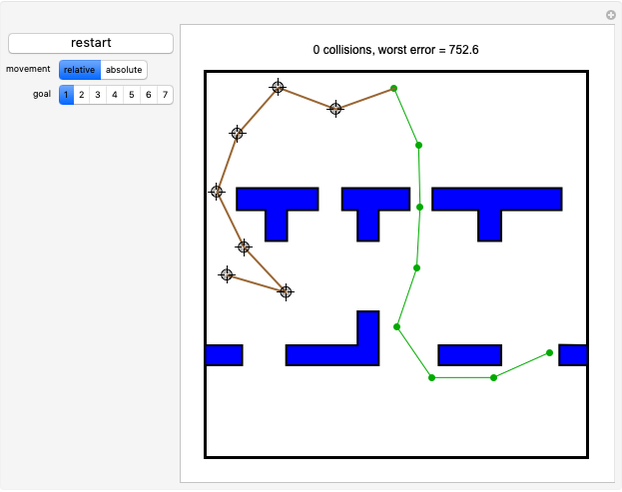
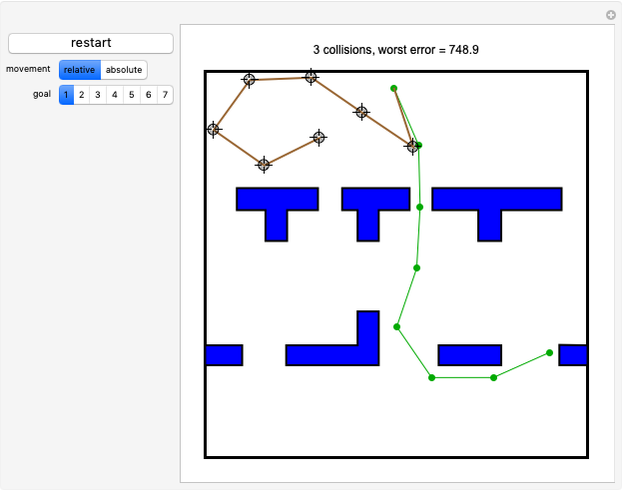
This Demonstration challenges you to move the seven-link robot (in brown) to match a goal configuration (in green) with the minimum number of collisions. Drag the locators to move the robot while avoiding collisions with the blue obstacles. This example was used in 1995 to introduce the probabilistic roadmap method (PRM), a robot motion-planning technique. Selecting "relative" movement changes the angle of one robot link at a time, and "absolute" rotates all subsequent links.
Contributed by: Aaron T. Becker and Yitong Lu (April 2020)
Open content licensed under CC BY-NC-SA
Snapshots
Details
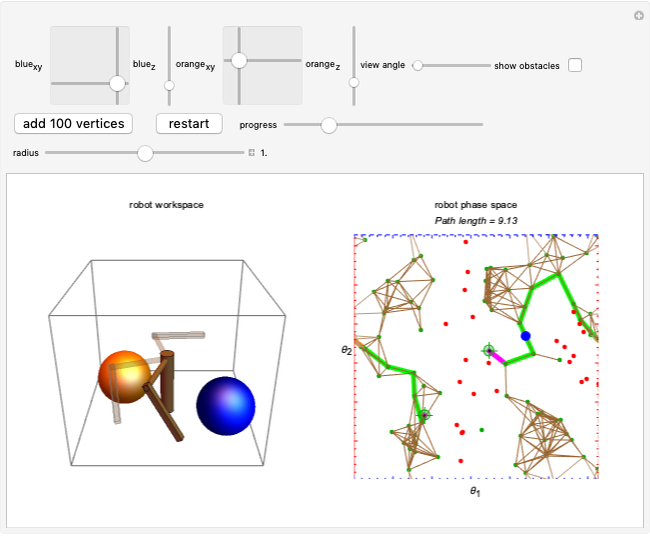
The goal of robot motion planning is to find a continuous path from an initial configuration to a goal configuration that is collision free. A configuration is a complete specification of every point of the robot. This Demonstration uses a seven-link robot with seven rotational joints that can each rotate from 0 to  . The resulting configuration space can be represented as a seven-dimensional torus. Obstacles in the robot's workspace map to obstacle regions in the configuration space, but computing these regions is computationally expensive. Planning for robots in high-dimensional spaces is difficult because representing the connected parts of high-dimensional spaces requires a number of samples that grows exponentially with the dimensionality of the space. This is commonly called "the curse of dimensionality."
. The resulting configuration space can be represented as a seven-dimensional torus. Obstacles in the robot's workspace map to obstacle regions in the configuration space, but computing these regions is computationally expensive. Planning for robots in high-dimensional spaces is difficult because representing the connected parts of high-dimensional spaces requires a number of samples that grows exponentially with the dimensionality of the space. This is commonly called "the curse of dimensionality."
The probabilistic roadmap method (PRM) was developed in 1996 by Lydia Kavraki et al. [1] as a general-purpose technique to solve such problems. Indeed, this Demonstration reproduces Figure 2 from [1]. PRMs generate a random roadmap that can be reused for subsequent motion-planning queries.
Reference
[1] L. E. Kavraki, P. Svestka, J-C. Latombe and M. H. Overmars. "Probabilistic Roadmaps for Path Planning in High-Dimensional Configuration Spaces." IEEE Transactions on Robotics and Automation, 12(4), 1996 pp. 566–580. doi:10.1109/70.508439.
Permanent Citation
 Probabilistic Roadmap Method for Robot Arm
Probabilistic Roadmap Method for Robot Arm
Aaron T. Becker and Yitong Lu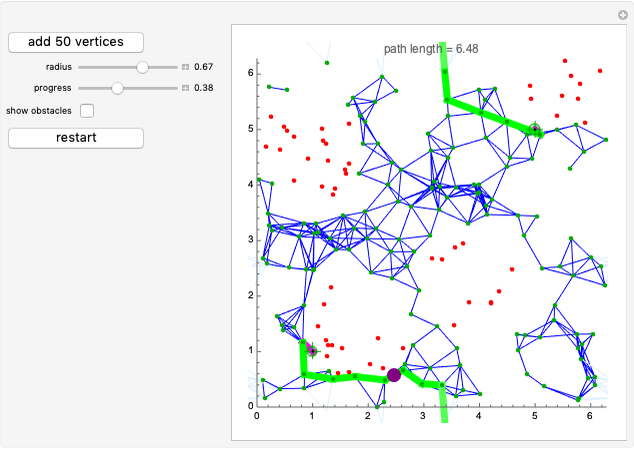 Probabilistic Roadmap Method
Probabilistic Roadmap Method
Aaron T. Becker and Yitong Lu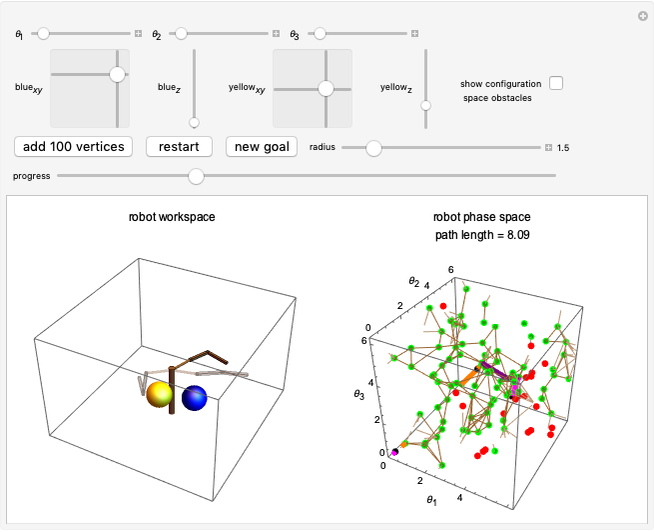 Probabilistic Roadmap Method in 3D
Probabilistic Roadmap Method in 3D
Aaron T. Becker and Yitong Lu Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala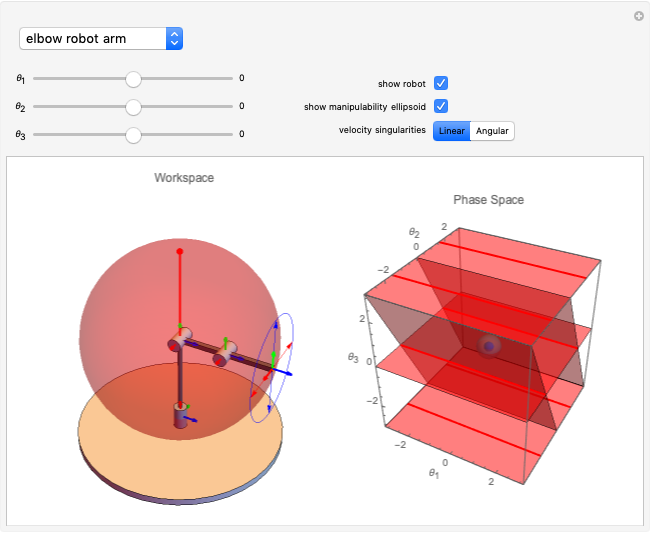 Robot Singularities in Three-Link Manipulators
Robot Singularities in Three-Link Manipulators
Aaron T. Becker and Yitong Lu Robot Motion with Obstacles
Robot Motion with Obstacles
Aaron T. Becker and Haoran Zhao Denavit-Hartenberg Parameters for a Three-Link Robot
Denavit-Hartenberg Parameters for a Three-Link Robot
Aaron T. Becker and Mary Burbage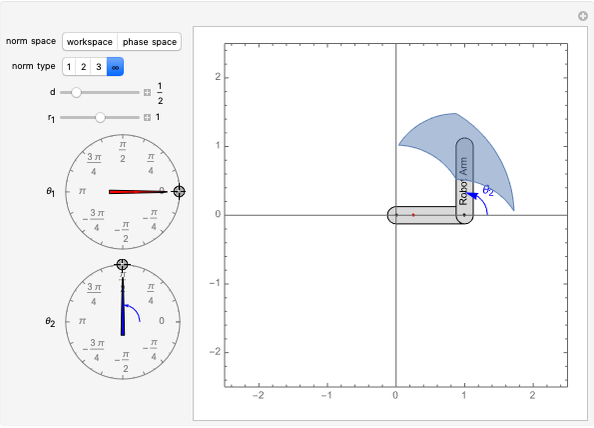 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker and Benedict Isichei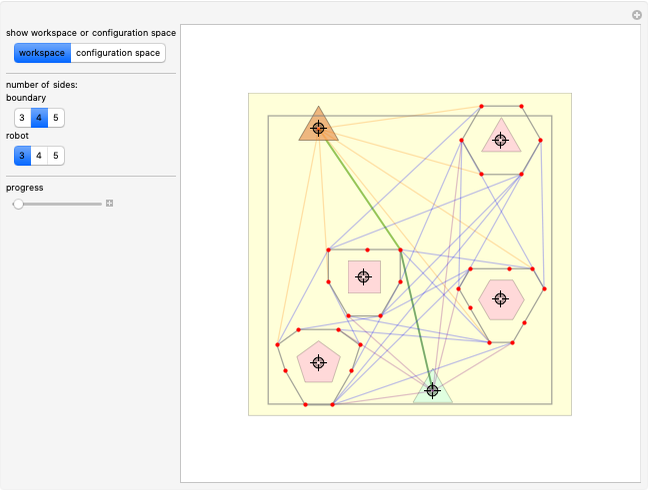 Motion Planning for Robot Path around Obstacles
Motion Planning for Robot Path around Obstacles
Shreyas Poyrekar, Aaron T. Becker and Arifa Sultana
-
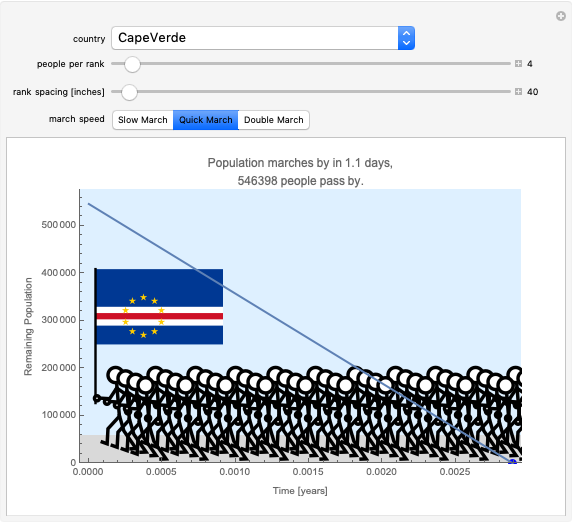 The Marching Chinese
The Marching Chinese
Aaron Becker -
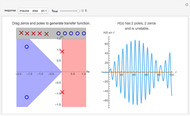 Poles and Zeros of Time-Domain Response Functions
Poles and Zeros of Time-Domain Response Functions
Aaron Becker -
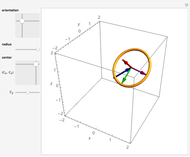 Parametric Equation of a Circle in 3D
Parametric Equation of a Circle in 3D
Aaron Becker -
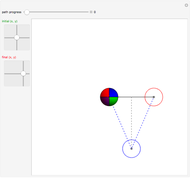
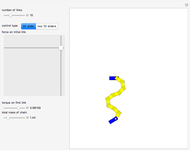 Kinematics of Planar Elastic Chains
Kinematics of Planar Elastic Chains
Aaron Becker -
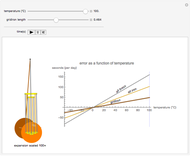
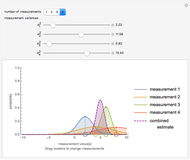 Sensor Fusion with Normally Distributed Noise
Sensor Fusion with Normally Distributed Noise
Aaron Becker -
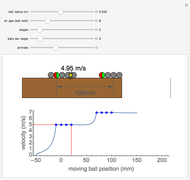 Optimizing a Gauss Gun
Optimizing a Gauss Gun
Aaron Becker -
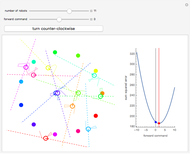 Ensemble Control of Robots with Unicycle Kinematics
Ensemble Control of Robots with Unicycle Kinematics
Aaron Becker -
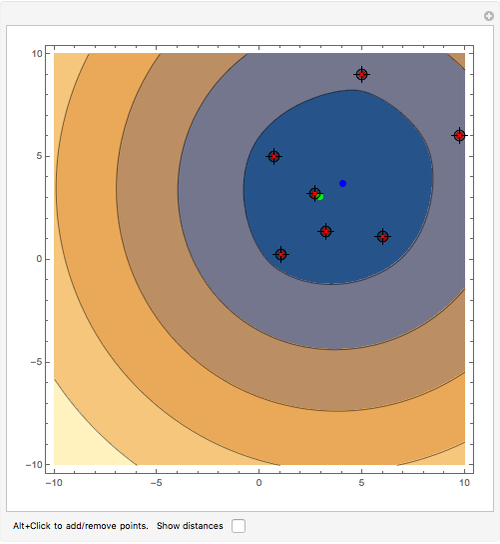 Weber Points and Multifocal Ellipse
Weber Points and Multifocal Ellipse
Aaron Becker -
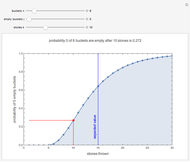 Coverage Probability with the Occupancy Problem
Coverage Probability with the Occupancy Problem
Aaron Becker -
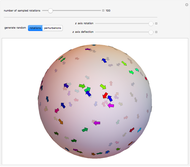 Sampling a Uniformly Random Rotation
Sampling a Uniformly Random Rotation
Aaron Becker -
 Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Roll a Sphere without Changing Orientation to a New Location in Two Straight Rolls
Aaron Becker -
 Gridiron Pendulum
Gridiron Pendulum
Aaron Becker -
 Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Roll Any Point on the Sphere to Any Desired Latitude-Longitude Coordinates with One Straight-Line Roll
Aaron Becker -
 Re-Orient a Sphere with Two Straight Rolls
Re-Orient a Sphere with Two Straight Rolls
Aaron Becker -
 Dark Fraction of the Moon
Dark Fraction of the Moon
Aaron Becker -
 Curvature of the Projection of a Trefoil Knot
Curvature of the Projection of a Trefoil Knot
Aaron Becker -
 Tangent Plane to a Sphere
Tangent Plane to a Sphere
Aaron Becker -
 Morph Sphere to Disc
Morph Sphere to Disc
Aaron Becker -
 Rolling a Sphere around a Circle without Slipping
Rolling a Sphere around a Circle without Slipping
Aaron Becker -
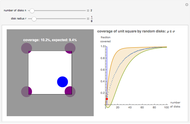 Coverage of a Unit Square by Random Discs
Coverage of a Unit Square by Random Discs
Aaron Becker