Dynamic Analysis of a Second-Order System with Harmonic Loading

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
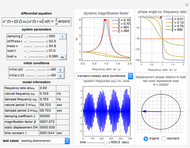
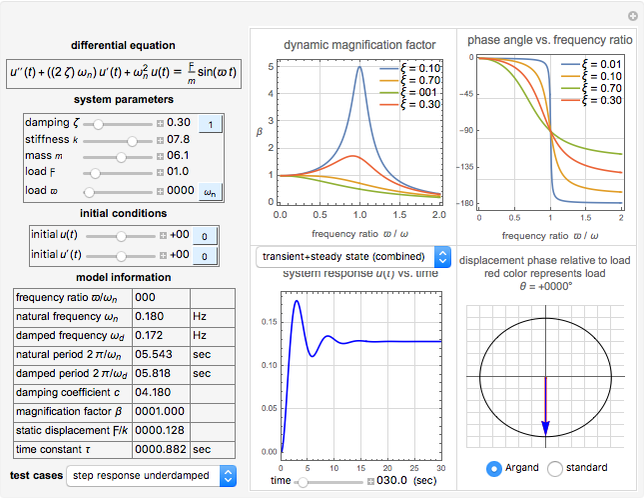
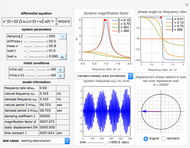
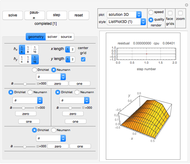
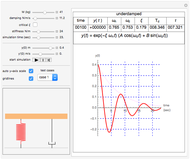
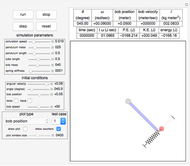
This Demonstration gives a complete analysis of a second-order system with harmonic loading. The system's differential equation is  , where
, where  ,
,  is the mass of the system,
is the mass of the system,  is the damping coefficient,
is the damping coefficient,  is the stiffness,
is the stiffness,  is the magnitude of the force, and
is the magnitude of the force, and  is the force frequency. The response
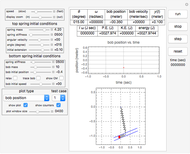
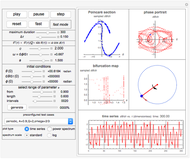
is the force frequency. The response  is plotted as a function of time for the underdamped, critically damped, and overdamped cases. This Demonstration displays the transient response (the homogeneous part of the total solution), the steady state response (the particular part of the total solution), and the total response, which is the combination of the two. You can see the analytical solution for each case by moving the mouse over the response curve. Separate displays are given for the dynamic magnification factor and the phase of the response relative to the force. A number of pre-configured test cases can be chosen, to illustrate several important cases of system responses under different loading conditions.
is plotted as a function of time for the underdamped, critically damped, and overdamped cases. This Demonstration displays the transient response (the homogeneous part of the total solution), the steady state response (the particular part of the total solution), and the total response, which is the combination of the two. You can see the analytical solution for each case by moving the mouse over the response curve. Separate displays are given for the dynamic magnification factor and the phase of the response relative to the force. A number of pre-configured test cases can be chosen, to illustrate several important cases of system responses under different loading conditions.
Contributed by: Nasser M. Abbasi (August 2013)
Open content licensed under CC BY-NC-SA
Snapshots
Details
The equation of motion of a second-order linear system of mass with harmonic applied loading is given by the differential equation  . There are 12 different analytical solutions depending on whether damping or loading is present and, if so, whether the system is underdamped, critically damped or overdamped.
. There are 12 different analytical solutions depending on whether damping or loading is present and, if so, whether the system is underdamped, critically damped or overdamped.
The solution for each of the 12 cases was derived analytically and shown in the Demonstration, subject to the user's choice. Following are definitions of the relevant parameters. All units are in SI.
The damping ratio is  , where is the damping coefficient, such that
, where is the damping coefficient, such that  represents critical damping. The natural underdamped frequency is given by
represents critical damping. The natural underdamped frequency is given by  , where is the stiffness and is the mass. The damped frequency of the system, defined for
, where is the stiffness and is the mass. The damped frequency of the system, defined for  , is
, is  . The frequency ratio is
. The frequency ratio is  , where is the forcing frequency. The dynamic magnification factor
, where is the forcing frequency. The dynamic magnification factor  is the ratio of the steady state response to the static response. The static response is given by
is the ratio of the steady state response to the static response. The static response is given by  , where is the force magnitude. The time constant is
, where is the force magnitude. The time constant is  and the damped period of oscillation is
and the damped period of oscillation is  .
.
When the system is undamped and the load is harmonic, resonance occurs when  or
or  . When the system is underdamped and the load is again harmonic, practical resonance occurs when
. When the system is underdamped and the load is again harmonic, practical resonance occurs when  and the corresponding maximum magnification factor is
and the corresponding maximum magnification factor is  . You can force the loading frequency to be equal to the natural frequency by clicking the button located to the right of the slider used to input the loading frequency. The forcing frequency is expressed in Hz, but converted to radians per second internally.
. You can force the loading frequency to be equal to the natural frequency by clicking the button located to the right of the slider used to input the loading frequency. The forcing frequency is expressed in Hz, but converted to radians per second internally.
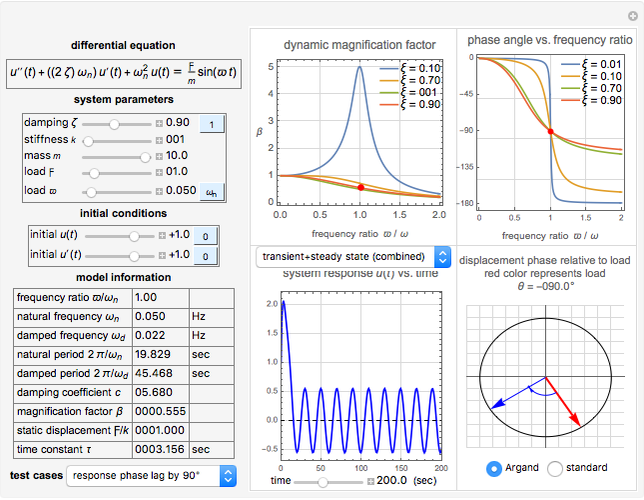
This Demonstration also shows plots of the phase of the response relative to loading  . The phase of the response lags behind loading by an angle
. The phase of the response lags behind loading by an angle  , which is plotted in the complex plane on an Argand diagram. The phase angle ranges from
, which is plotted in the complex plane on an Argand diagram. The phase angle ranges from  to
to  .
.
When the loading frequency is set to zero, only is used as the force  . This allows a constant force loading, . For example, by setting
. This allows a constant force loading, . For example, by setting  and
and  , a step response is obtained. To make the loading zero, the slider is set equal to zero.
, a step response is obtained. To make the loading zero, the slider is set equal to zero.
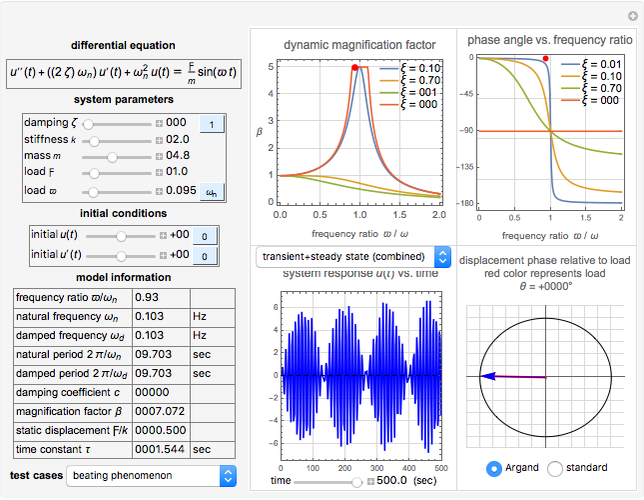
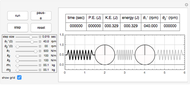
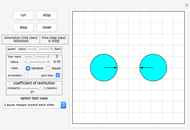
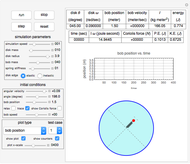
The Demonstration contains a number of pre-configured test cases to illustrate different loading conditions, such as beating phenomenon, resonance, practical response, impulse response, and step responses for different damping values.
References
[1] M. Paz and W. Leigh, Structural Dynamics: Theory and Computation, 5th ed., Boston: Kluwer Academic Publishers, 2004.
[2] W. T. Thomson, Theory of Vibration with Applications, Englewood Cliffs, NJ: Prentice-Hall, 1972.
[3] R. W. Clough and J. Penzien, Dynamics of Structures, New York: McGraw-Hill, 1975.
[4] R. K. Vierck, Vibration Analysis, Scranton, PA: International Textbook Company, 1967.
[5] A. A. Shabana, Theory of Vibration, Vol. 1, New York: Springer-Verlag, 1991.
[6] B. Morrill, Mechanical Vibrations, New York: Ronald Press, 1957.
Permanent Citation
 Time Evolution of a Four-Spring Three-Mass System
Time Evolution of a Four-Spring Three-Mass System
Michael Trott Motion of an n-Point Dynamical System
Motion of an n-Point Dynamical System
Faisal Mohamed Tuned Mass Damper System
Tuned Mass Damper System
Enrique Zeleny Steady States for a Dynamical System in 2D
Steady States for a Dynamical System in 2D
Brian G. Higgins and Housam Binous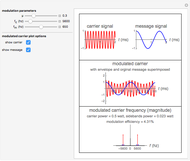 Power Efficiency of Amplitude Modulation
Power Efficiency of Amplitude Modulation
Nasser M. Abbasi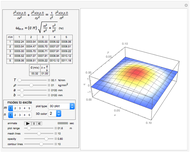 Vibration of a Rectangular Membrane
Vibration of a Rectangular Membrane
Nasser M. Abbasi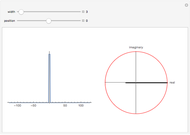 Fourier Coefficients of a Square Pulse
Fourier Coefficients of a Square Pulse
Gregg M. Gallatin Bifurcations in First-Order ODEs
Bifurcations in First-Order ODEs
Brian Vick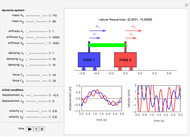 Spring-Mass-Damping System with Two Degrees of Freedom
Spring-Mass-Damping System with Two Degrees of Freedom
Frederick Wu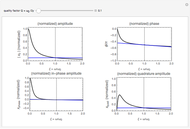 Resonance Lineshapes of a Driven Damped Harmonic Oscillator
Resonance Lineshapes of a Driven Damped Harmonic Oscillator
Antoine Weis (University of Fribourg)
-
 Heavy Spring with Double Pendulum
Heavy Spring with Double Pendulum
Nasser M. Abbasi -
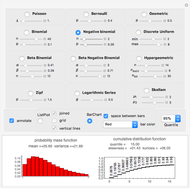 Illustrating the Use of Discrete Distributions
Illustrating the Use of Discrete Distributions
Nasser M. Abbasi -
 Dynamic Analysis of a Second-Order System with Harmonic Loading
Dynamic Analysis of a Second-Order System with Harmonic Loading
Nasser M. Abbasi -
 Cauchy and Engineering Strain Deformation in 3D
Cauchy and Engineering Strain Deformation in 3D
Nasser M. Abbasi -
 Dynamics of Two Cylinders with Three Springs
Dynamics of Two Cylinders with Three Springs
Nasser M. Abbasi -
 Principal Stresses and Mohr's Circle for Plane Stress
Principal Stresses and Mohr's Circle for Plane Stress
Nasser M. Abbasi -
 Solving the 2D Poisson PDE by Eight Different Methods
Solving the 2D Poisson PDE by Eight Different Methods
Nasser M. Abbasi -
Vibration of a Rectangular Membrane
Nasser M. Abbasi -
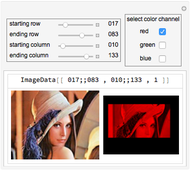 Selecting from ImageData Using Rows and Columns
Selecting from ImageData Using Rows and Columns
Nasser M. Abbasi -
 Three Pendulums Connected by Two Springs
Three Pendulums Connected by Two Springs
Nasser M. Abbasi -
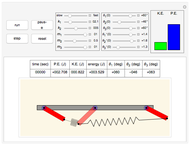
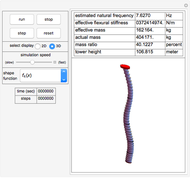 Wind Tower Structure Represented by Generalized Single Degree of Freedom
Wind Tower Structure Represented by Generalized Single Degree of Freedom
Nasser M. Abbasi -
 Free Response in a Second-Order System
Free Response in a Second-Order System
Nasser M. Abbasi -
 Chaotic Motion of a Damped Driven Pendulum: Bifurcation, Poincaré Map, Power Spectrum, and Phase Portrait
Chaotic Motion of a Damped Driven Pendulum: Bifurcation, Poincaré Map, Power Spectrum, and Phase Portrait
Nasser M. Abbasi -
 Particle Motion Simulation Using A Priori Collision Detection
Particle Motion Simulation Using A Priori Collision Detection
Nasser M. Abbasi -
 Spring-Mass System on a Rotating Table
Spring-Mass System on a Rotating Table
Nasser M. Abbasi -
 Solid Pendulum with a Spring-Mass System
Solid Pendulum with a Spring-Mass System
Nasser M. Abbasi -
 Solving the Convection-Diffusion Equation in 1D Using Finite Differences
Solving the Convection-Diffusion Equation in 1D Using Finite Differences
Nasser M. Abbasi -
 Solving the Diffusion-Advection-Reaction Equation in 1D Using Finite Differences
Solving the Diffusion-Advection-Reaction Equation in 1D Using Finite Differences
Nasser M. Abbasi -
 Solving the 1D Helmholtz Differential Equation Using Finite Differences
Solving the 1D Helmholtz Differential Equation Using Finite Differences
Nasser M. Abbasi -
 Solving the 2D Helmholtz Partial Differential Equation Using Finite Differences
Solving the 2D Helmholtz Partial Differential Equation Using Finite Differences
Nasser M. Abbasi