Expected Motion in 2x2 Symmetric Games Played by Reinforcement Learners





Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
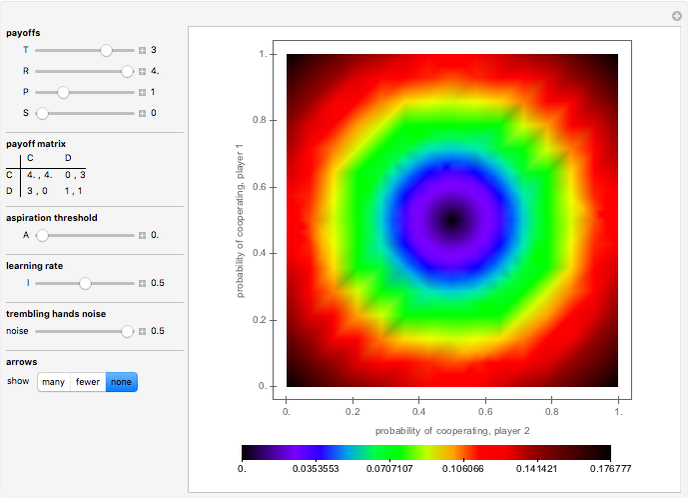
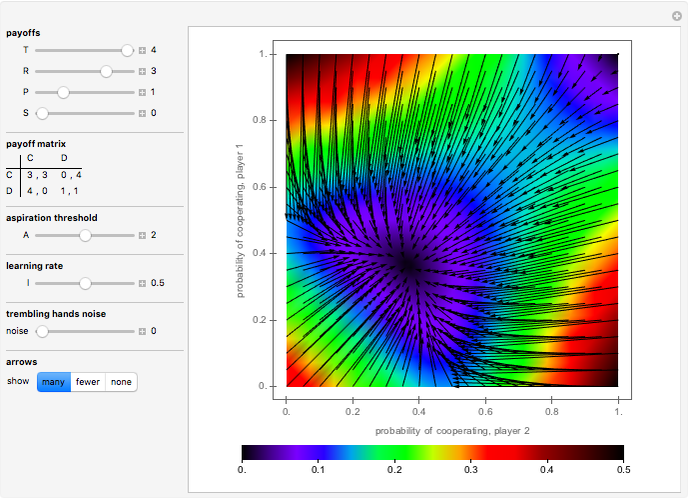
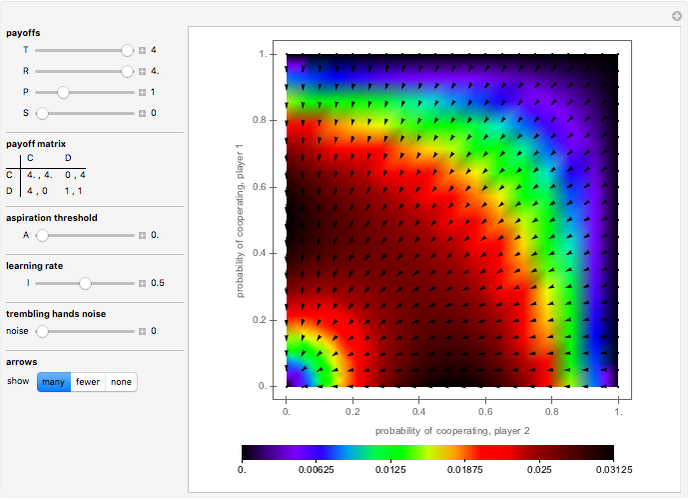
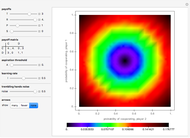
The figure shows the expected motion of a system where two players using the Bush–Mosteller reinforcement learning algorithm play a symmetric  game.
game.  (for temptation) is the payoff a defector gets when the other player cooperates;
(for temptation) is the payoff a defector gets when the other player cooperates;  (for reward) is the payoff obtained by both players when they both cooperate; both players obtain a payoff of
(for reward) is the payoff obtained by both players when they both cooperate; both players obtain a payoff of  (for punishment) when they both defect; and finally,
(for punishment) when they both defect; and finally,  (for sucker) is the payoff a cooperator gets when the other player defects. Parameter
(for sucker) is the payoff a cooperator gets when the other player defects. Parameter  denotes both players' aspiration threshold, and
denotes both players' aspiration threshold, and  is their learning rate. Noise is the probability that a player undertakes the opposite action she or he intended. The arrows represent the expected motion at various states of the system. The background is colored using the norm of the expected motion.
is their learning rate. Noise is the probability that a player undertakes the opposite action she or he intended. The arrows represent the expected motion at various states of the system. The background is colored using the norm of the expected motion.
Contributed by: Luis R. Izquierdo and Segismundo S. Izquierdo (April 2008)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Reinforcement learners tend to repeat actions that led to satisfactory outcomes in the past, and avoid choices that resulted in unsatisfactory experiences. This behavior is one of the most widespread adaptation mechanisms in nature. This Demonstration shows the expected motion of a system where two players using the Bush–Mosteller reinforcement learning algorithm play a symmetric  game. Mathematical analyses conducted by the contributors of this Demonstration show that the expected motion displayed in the figure is especially relevant to characterize the transient dynamics of the system, particularly with small learning rates, but, on the other hand, this expected motion can be misleading when studying the asymptotic behavior of the model. Further information at http://luis.izqui.org and http://segis.izqui.org.
game. Mathematical analyses conducted by the contributors of this Demonstration show that the expected motion displayed in the figure is especially relevant to characterize the transient dynamics of the system, particularly with small learning rates, but, on the other hand, this expected motion can be misleading when studying the asymptotic behavior of the model. Further information at http://luis.izqui.org and http://segis.izqui.org.
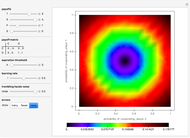
Snapshot 1: stag hunt game ( ;
;  ;
;  ;
;  ) played by two players with aspiration threshold equal to 0 and learning rate equal to 0.5; the noise is equal to 0.5, which means that players are making their decisions at random
) played by two players with aspiration threshold equal to 0 and learning rate equal to 0.5; the noise is equal to 0.5, which means that players are making their decisions at random
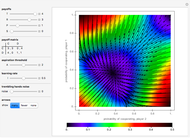
Snapshot 2: prisoner's dilemma game ( ;
;  ;
;  ;
;  ) played by two players with aspiration threshold equal to 2 and learning rate equal to 0.5
) played by two players with aspiration threshold equal to 2 and learning rate equal to 0.5
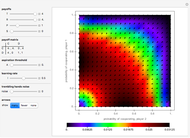
Snapshot 3: a game ( ;
;  ;
;  ;
;  ) played by two players with aspiration threshold equal to 0 and learning rate equal to 0.5
) played by two players with aspiration threshold equal to 0 and learning rate equal to 0.5
Snapshot 4: a coordination game ( ;
;  ;
;  ;
;  ) played by two players with aspiration threshold equal to 0 and learning rate equal to 0.5
) played by two players with aspiration threshold equal to 0 and learning rate equal to 0.5
Permanent Citation
 Eco-evolutionary Game Dynamics with Synergy and Discounting
Eco-evolutionary Game Dynamics with Synergy and Discounting
Chaitanya S. Gokhale Payoff Gradients in Two-Player Games
Payoff Gradients in Two-Player Games
Seth J. Chandler Expected Dynamics of an Imitation Model in 2x2 Symmetric Games
Expected Dynamics of an Imitation Model in 2x2 Symmetric Games
Luis R. Izquierdo and Segismundo S. Izquierdo Expected Dynamics of an Intra-Population Imitation Model for Inter-Population 2x2 Symmetric Games
Expected Dynamics of an Intra-Population Imitation Model for Inter-Population 2x2 Symmetric Games
Luis R. Izquierdo and Segismundo S. Izquierdo An Imitation Model for 2x2 Symmetric Games
An Imitation Model for 2x2 Symmetric Games
Luis R. Izquierdo and Segismundo S. Izquierdo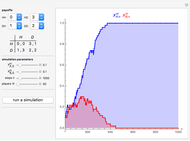 An Intra-Population Imitation Model for Inter-Population 2x2 Symmetric Games
An Intra-Population Imitation Model for Inter-Population 2x2 Symmetric Games
Luis R. Izquierdo and Segismundo S. Izquierdo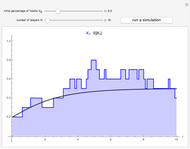 Expected Dynamics of an Imitation Model in the Hawk-Dove Game
Expected Dynamics of an Imitation Model in the Hawk-Dove Game
Luis R. Izquierdo and Segismundo S. Izquierdo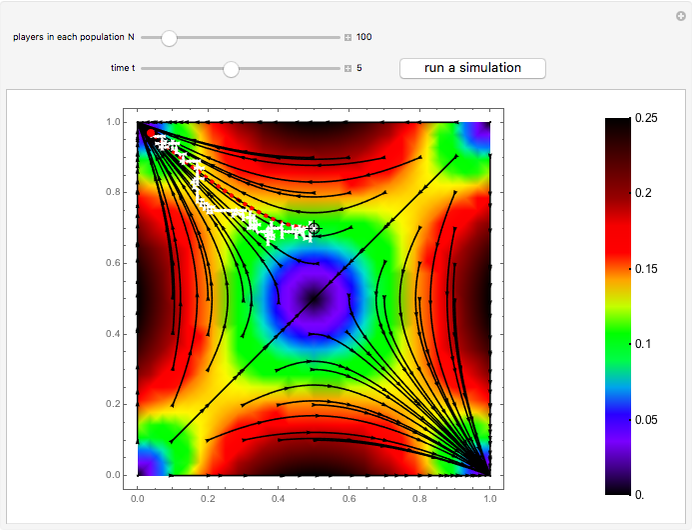 Expected Dynamics of an Intra-Population Imitation Model in the Two-Population Hawk-Dove Game
Expected Dynamics of an Intra-Population Imitation Model in the Two-Population Hawk-Dove Game
Luis R. Izquierdo and Segismundo S. Izquierdo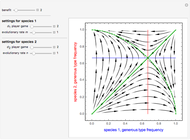 Mutualism and Evolutionary Multiplayer Games: Revisiting the Red King Effect
Mutualism and Evolutionary Multiplayer Games: Revisiting the Red King Effect
Chaitanya S. Gokhale An Imitation Model in the Hawk-Dove Game
An Imitation Model in the Hawk-Dove Game
Luis R. Izquierdo and Segismundo S. Izquierdo
-
 Mixing and Infection in a Two-Group SIS Model
Mixing and Infection in a Two-Group SIS Model
Segismundo S. Izquierdo -
Expected Dynamics of an Intra-Population Imitation Model in the Two-Population Hawk-Dove Game
Segismundo S. Izquierdo -
 An Intra-Population Imitation Model in the Two-Population Hawk-Dove Game
An Intra-Population Imitation Model in the Two-Population Hawk-Dove Game
Segismundo S. Izquierdo -
Expected Dynamics of an Imitation Model in the Hawk-Dove Game
Segismundo S. Izquierdo -
An Imitation Model in the Hawk-Dove Game
Segismundo S. Izquierdo -
 Expected Motion in 2x2 Symmetric Games Played by Reinforcement Learners
Expected Motion in 2x2 Symmetric Games Played by Reinforcement Learners
Segismundo S. Izquierdo -
Expected Dynamics of an Imitation Model in 2x2 Symmetric Games
Segismundo S. Izquierdo -
An Intra-Population Imitation Model for Inter-Population 2x2 Symmetric Games
Segismundo S. Izquierdo -
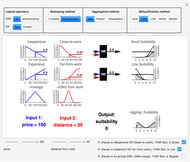 Inference with Fuzzy IF-THEN Rules
Inference with Fuzzy IF-THEN Rules
Segismundo S. Izquierdo -
An Imitation Model for 2x2 Symmetric Games
Segismundo S. Izquierdo -
Expected Dynamics of an Intra-Population Imitation Model for Inter-Population 2x2 Symmetric Games
Segismundo S. Izquierdo -
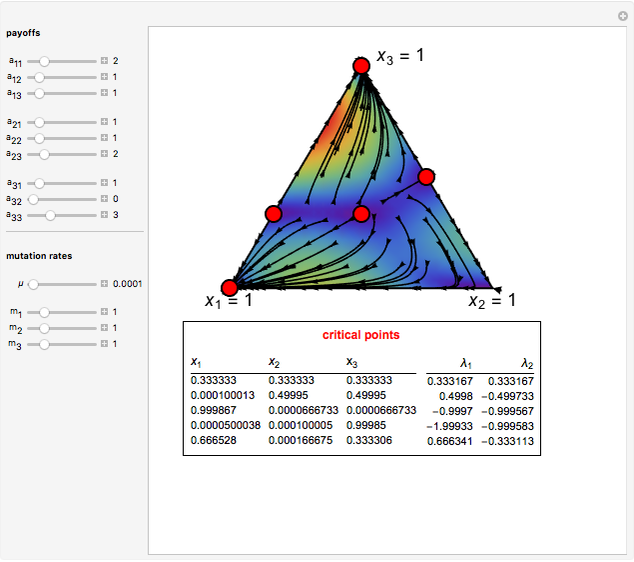 Replicator-Mutator Dynamics with Three Strategies
Replicator-Mutator Dynamics with Three Strategies
Segismundo S. Izquierdo -
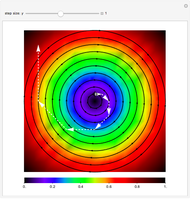 Difference Equation versus Differential Equation
Difference Equation versus Differential Equation
Segismundo S. Izquierdo