A Model of the SCARA Robot




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
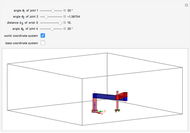
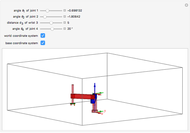
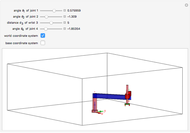
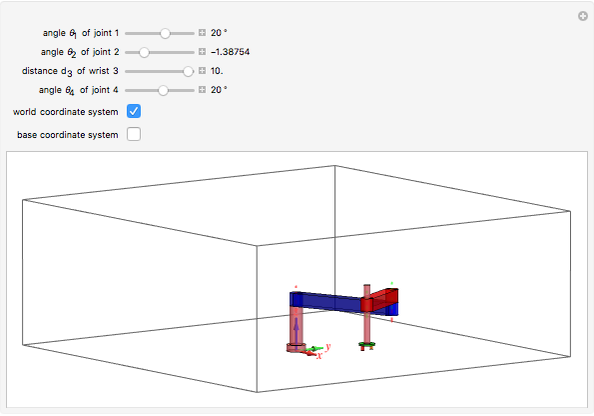
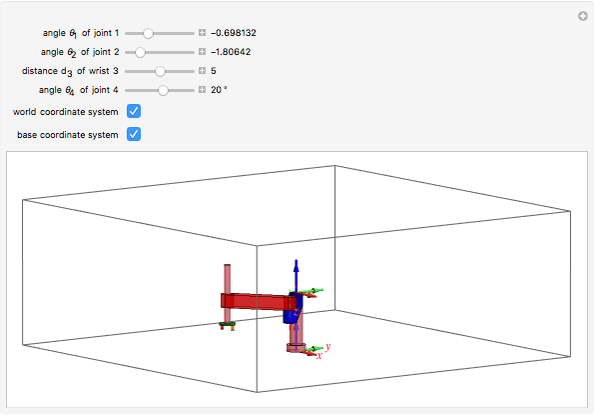
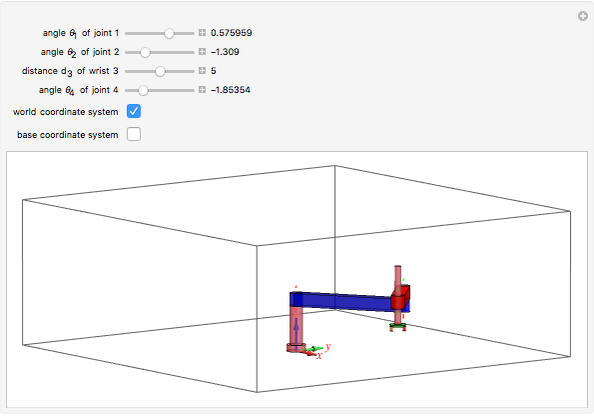
The SCARA robot (Selective Compliance Assembly Robot Arm) has four degrees of freedom: three rotations and one translation. The model described in this Demonstration illustrates the forward kinematics of SCARA by manipulation of four parameters.
Contributed by: Shutao Tang (March 2014)
(Changzhou University, Jiangsu Province, China)
Open content licensed under CC BY-NC-SA
Snapshots
Permanent Citation
"A Model of the SCARA Robot"
http://demonstrations.wolfram.com/AModelOfTheSCARARobot/
Wolfram Demonstrations Project
Published: March 18 2014
 Kinematics of SCARA Robot in 2D
Kinematics of SCARA Robot in 2D
Shutao Tang Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Frederick Wu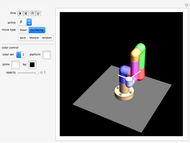 Animated Model of an Industrial Robot Arm
Animated Model of an Industrial Robot Arm
Karl Scherer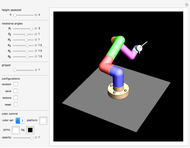 Model of an Industrial Robot Arm
Model of an Industrial Robot Arm
Karl Scherer Probabilistic Models for Robot Motion
Probabilistic Models for Robot Motion
Aaron T. Becker and Renuka Pakeetharan Robot Builder
Robot Builder
Frank Liao Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati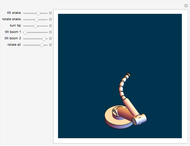 Snake-Arm Robot
Snake-Arm Robot
Sándor Kabai Fractal Robot Arm
Fractal Robot Arm
Sándor Kabai Common Robot Arm Configurations
Common Robot Arm Configurations
Mohammad Sultan and Aaron T. Becker
-
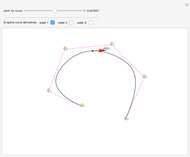
 Algorithm for Cubic Nonuniform B-Spline Curve Interpolation
Algorithm for Cubic Nonuniform B-Spline Curve Interpolation
Shutao Tang -
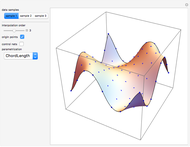
 Algorithm for Bicubic Nonuniform B-Spline Surface Interpolation
Algorithm for Bicubic Nonuniform B-Spline Surface Interpolation
Shutao Tang -
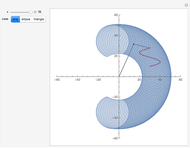
 Cylindrical Surfaces from NURBS Curves
Cylindrical Surfaces from NURBS Curves
Shutao Tang -
 Constructing a Swung Surface around a B-Spline Curve
Constructing a Swung Surface around a B-Spline Curve
Shutao Tang -
 Global B-Spline Surface Interpolation
Global B-Spline Surface Interpolation
Shutao Tang -
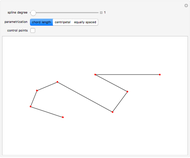 Global B-Spline Curve Interpolation
Global B-Spline Curve Interpolation
Shutao Tang -
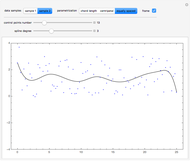 Global B-Spline Curve Fitting by Least Squares
Global B-Spline Curve Fitting by Least Squares
Shutao Tang -
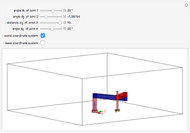 A Model of the SCARA Robot
A Model of the SCARA Robot
Shutao Tang -
 The Derivative Vectors of a B-Spline
The Derivative Vectors of a B-Spline
Shutao Tang -
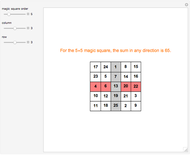 Magic Squares for Odd, Singly Even, and Doubly Even Orders
Magic Squares for Odd, Singly Even, and Doubly Even Orders
Shutao Tang -
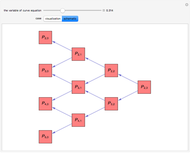 Generating a B-Spline Curve by the Cox-De Boor Algorithm
Generating a B-Spline Curve by the Cox-De Boor Algorithm
Shutao Tang -
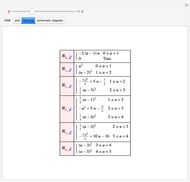 Calculating and Plotting B-Spline Basis Functions
Calculating and Plotting B-Spline Basis Functions
Shutao Tang -
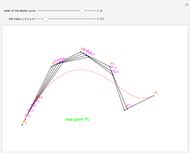 Generating a Bezier Curve by the de Casteljau Algorithm
Generating a Bezier Curve by the de Casteljau Algorithm
Shutao Tang -
Forward and Inverse Kinematics of the SCARA Robot
Shutao Tang -
Kinematics of SCARA Robot in 2D
Shutao Tang -
 A Two-Link Inverse-Kinematic Mechanism
A Two-Link Inverse-Kinematic Mechanism
Shutao Tang