Graham Scan to Find the Convex Hull of a Set of Points in 2D

Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
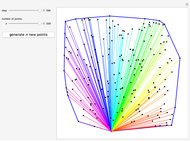
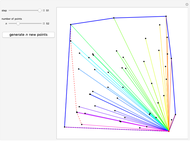
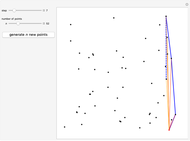
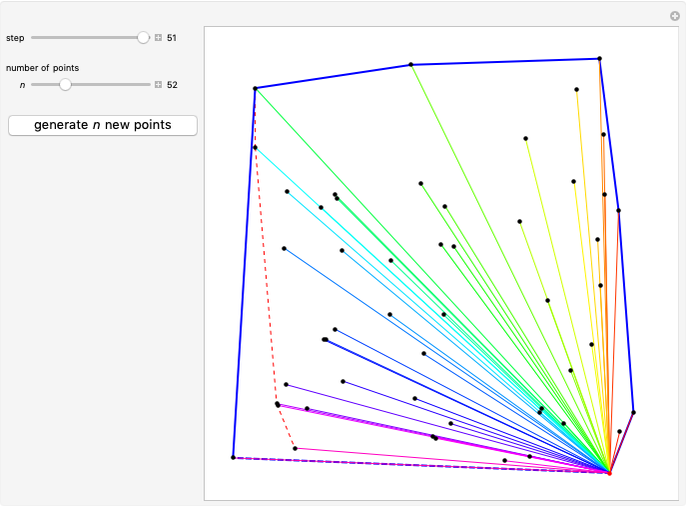
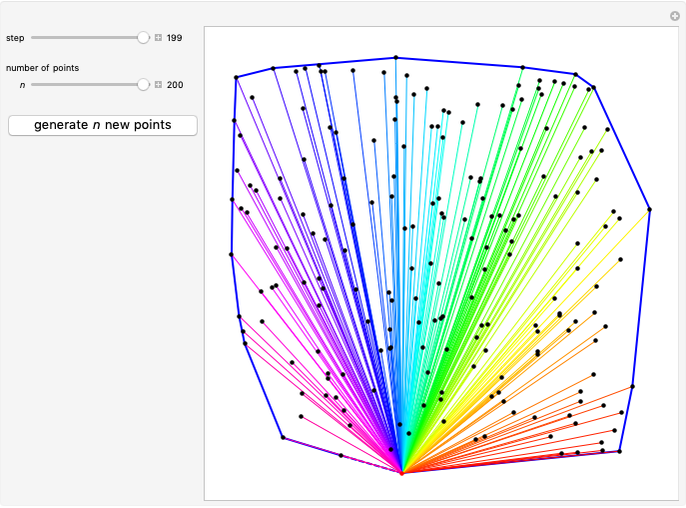
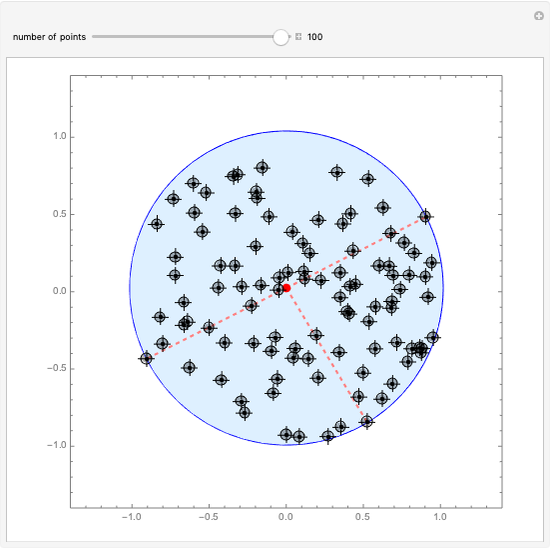
This Demonstration shows the steps of the Graham scan, an algorithm to find the convex hull of a finite set of points in 2D. The method has time complexity  for
for  points. You can drag the points to change their positions, move the step slider to step through the algorithm or generate
points. You can drag the points to change their positions, move the step slider to step through the algorithm or generate  new points for a new problem.
new points for a new problem.
Contributed by: Aaron T. Becker, Yitong Lu and Daniel Biediger (December 2020)
Open content licensed under CC BY-NC-SA
Snapshots


Details
The first step is to find the point with the lowest  coordinate. This is the starting point of the convex hull. (If more than one point has this value, the rightmost one is used). Second, all the remaining points are sorted by polar angle from the starting point. This can be accomplished without trigonometry by using the reciprocal of the slope (–run/rise); use negative infinity if the points have the same
coordinate. This is the starting point of the convex hull. (If more than one point has this value, the rightmost one is used). Second, all the remaining points are sorted by polar angle from the starting point. This can be accomplished without trigonometry by using the reciprocal of the slope (–run/rise); use negative infinity if the points have the same  coordinate. Call this list sortedPoints.
coordinate. Call this list sortedPoints.
The algorithm then considers each sorted point in sequence, which you can animate by moving the "step" slider.
A stack called convexHull is maintained, initialized with the starting point and the first sorted point. For every additional point in sortedPoints, we determine if connecting to this point from the convexHull required a left turn or a right turn. If a right turn was required, points are popped off the stack convexHull until connecting to the current point in sortedPoints requires a left turn (the removed lines from convexHull are drawn as dashed red lines). This point is then added to convexHull, and the process is repeated until all the points in sortedPoints have stepped through.
The function isLeftTurn[] returns the signed area of the triangle defined by the points  ,
,  ,
,  . If this area is positive, then going from
. If this area is positive, then going from  to
to  is a left turn. If the area is negative, it is a right turn. The area computation is the determinant of a
is a left turn. If the area is negative, it is a right turn. The area computation is the determinant of a  matrix, and so requires no trigonometric functions.
matrix, and so requires no trigonometric functions.
Reference
[1] R. L. Graham, "An Efficient Algorithm for Determining the Convex Hull of a Finite Planar Set," Information Processing Letters, 1(4), 1972 pp. 132–133. doi:10.1016/0020-0190(72)90045-2.
Permanent Citation
 Jarvis March to Find the Convex Hull of a Set of Points in 2D
Jarvis March to Find the Convex Hull of a Set of Points in 2D
Ferenc Beleznay Largest Disk in a Convex Polygon
Largest Disk in a Convex Polygon
Jaime Rangel-Mondragon Testing a Polygon for Convexity and Self-Intersection
Testing a Polygon for Convexity and Self-Intersection
Jaime Rangel-Mondragon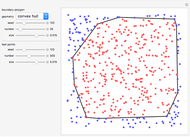 Franklin's Point Inclusion in Polygon (PNPOLY) Algorithm
Franklin's Point Inclusion in Polygon (PNPOLY) Algorithm
Frederick Wu Catching a Point within a Teragon
Catching a Point within a Teragon
Vasil Saroka Voronoi Diagrams
Voronoi Diagrams
Ed Pegg Jr and Jeff Bryant Art Gallery Problem
Art Gallery Problem
Shreyas Poyrekar, Arifa Sultana and Aaron T. Becker Visibility Region of a Polygon
Visibility Region of a Polygon
Shreyas Poyrekar, Arifa Sultana and Aaron T. Becker Lloyd Relaxation of Voronoi Diagrams
Lloyd Relaxation of Voronoi Diagrams
Daniel Jacobson Stained Glass Window Generator
Stained Glass Window Generator
Erik Mahieu
-
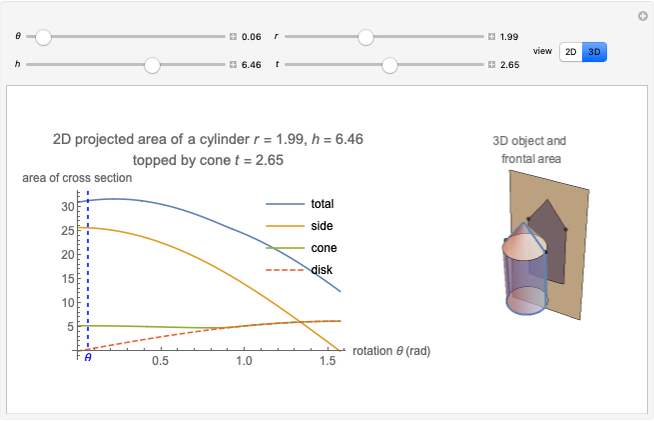 Projected Areas of Cylinder and Cone
Projected Areas of Cylinder and Cone
Aaron T. Becker -
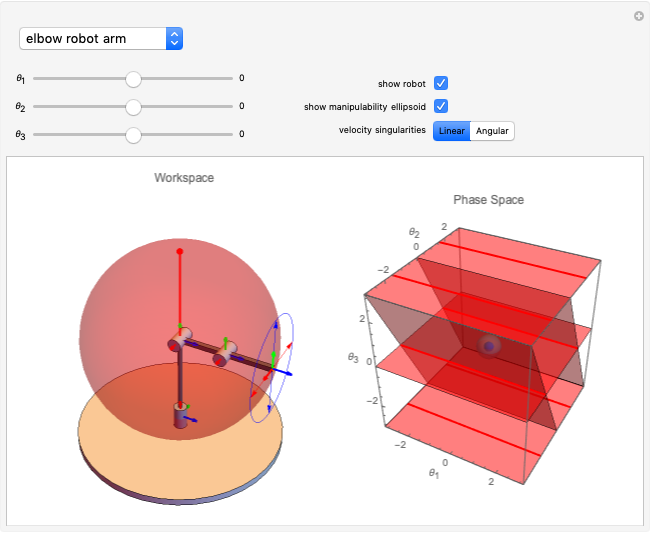 Robot Singularities in Three-Link Manipulators
Robot Singularities in Three-Link Manipulators
Aaron T. Becker -
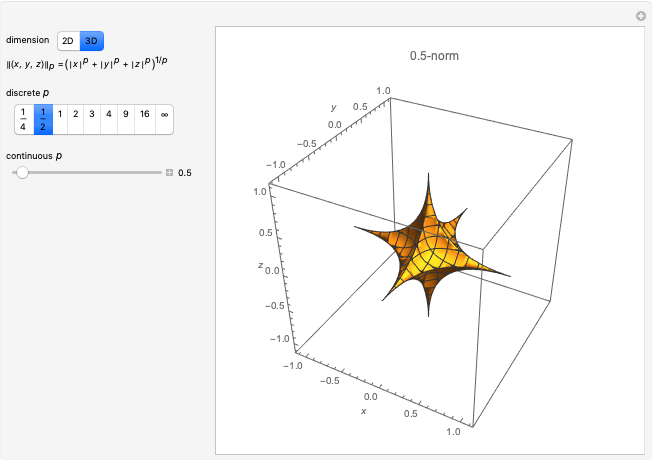 Unit Balls for Different p-Norms in 2D and 3D
Unit Balls for Different p-Norms in 2D and 3D
Aaron T. Becker -
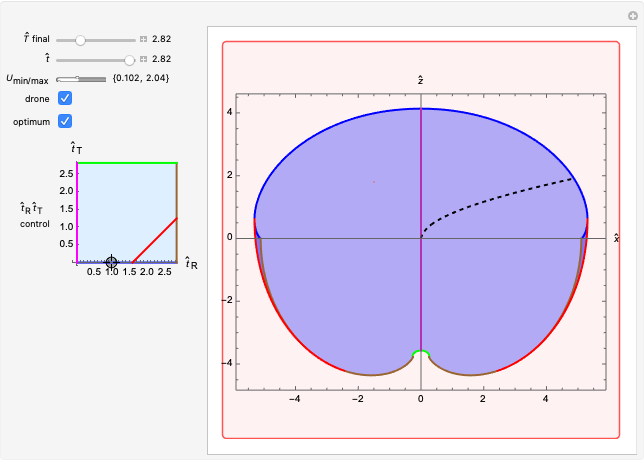
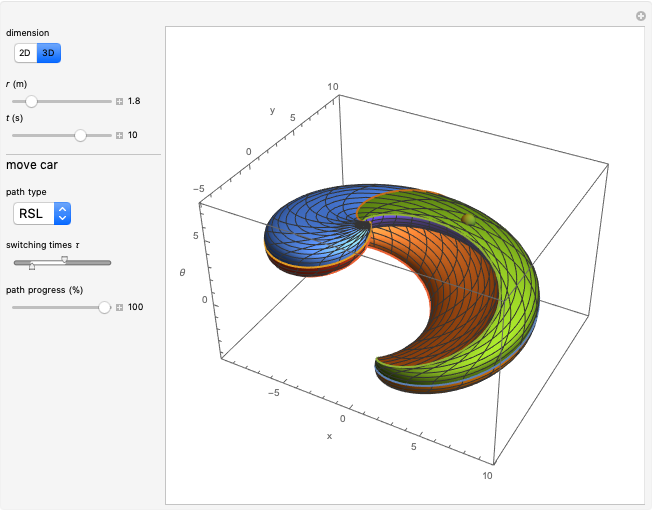 3D Reachability Set for a Dubins Car
3D Reachability Set for a Dubins Car
Aaron T. Becker -
 Graham Scan to Find the Convex Hull of a Set of Points in 2D
Graham Scan to Find the Convex Hull of a Set of Points in 2D
Aaron T. Becker -
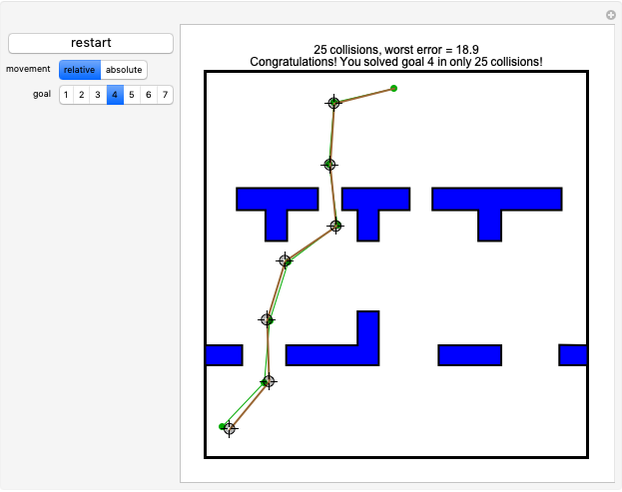
 Motion Planning for Robot Path around Obstacles
Motion Planning for Robot Path around Obstacles
Aaron T. Becker -
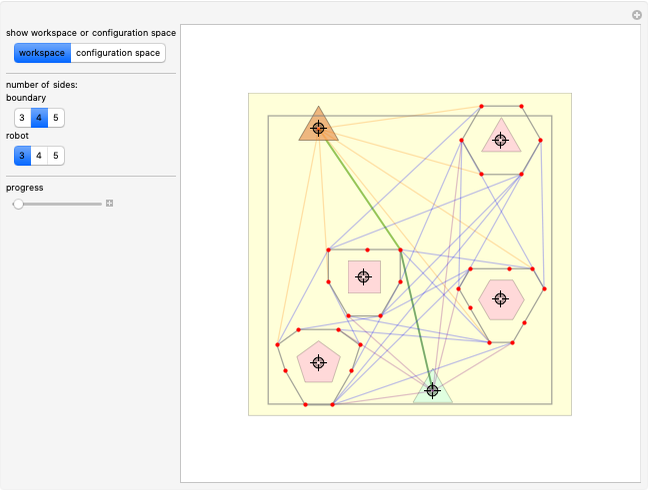
 Probabilistic Roadmap Method with Seven-Link Articulated Robot
Probabilistic Roadmap Method with Seven-Link Articulated Robot
Aaron T. Becker -
 Probabilistic Roadmap Method in 3D
Probabilistic Roadmap Method in 3D
Aaron T. Becker -
 Base Conversions from Base 2 through 100 Using Radix Points
Base Conversions from Base 2 through 100 Using Radix Points
Aaron T. Becker -
 Probabilistic Roadmap Method for Robot Arm
Probabilistic Roadmap Method for Robot Arm
Aaron T. Becker -
 Probabilistic Roadmap Method
Probabilistic Roadmap Method
Aaron T. Becker -
 Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker -
 Reachable Set for a Drone
Reachable Set for a Drone
Aaron T. Becker -
 Smallest Circle Problem
Smallest Circle Problem
Aaron T. Becker -
Art Gallery Problem
Aaron T. Becker -
Visibility Region of a Polygon
Aaron T. Becker -
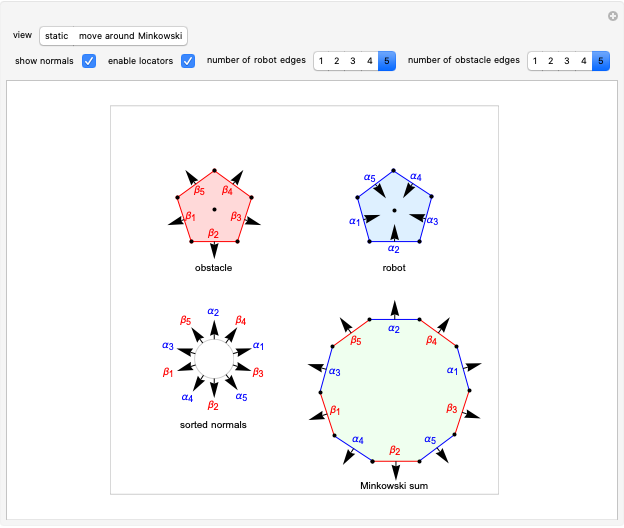 Minkowski Sum of Convex Robot and Obstacle
Minkowski Sum of Convex Robot and Obstacle
Aaron T. Becker -
 Maximizing Apparent Velocity in a Camera's Frame
Maximizing Apparent Velocity in a Camera's Frame
Aaron T. Becker -
 Steering Multiple Radio Control (RC) Cars with One Joystick
Steering Multiple Radio Control (RC) Cars with One Joystick
Aaron T. Becker -
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker