Optimal Control of a Continuous Stirred-Tank Reactor



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
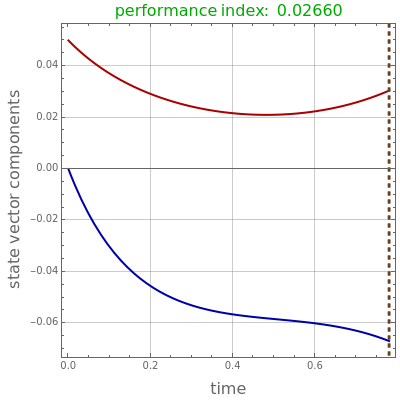
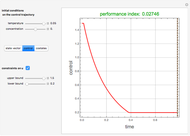
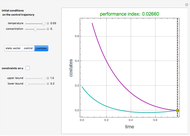
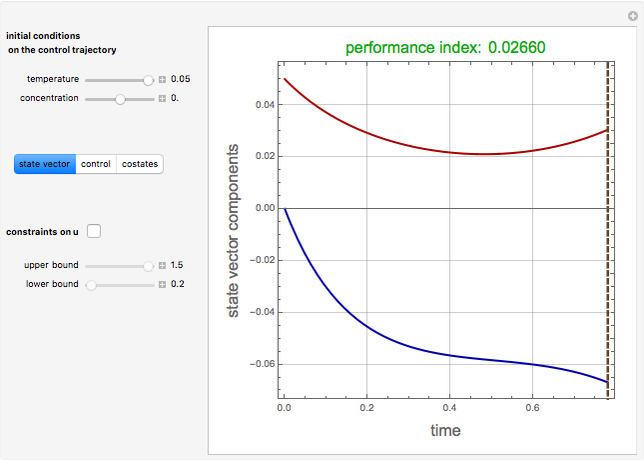
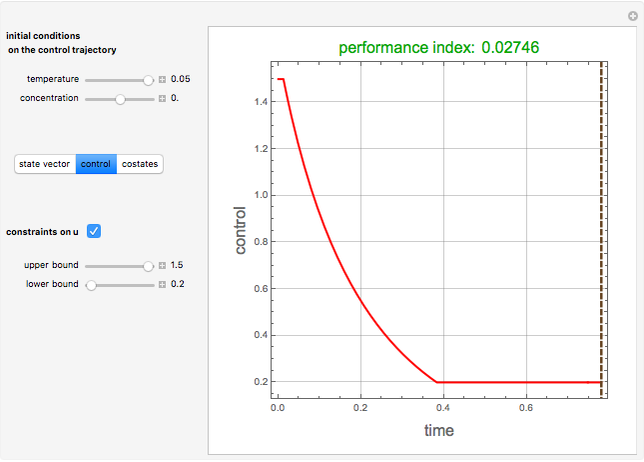
Aris and Amundson [1–3] originally analyzed the design of a continuous stirred-tank reactor (CSTR) with a first-order, irreversible exothermic reaction. The reactor is controlled by varying the flow of a cooling fluid through a coil inside the reactor. The state equations for the CSTR are given by
[more]


















Contributed by: Housam Binous and Ahmed Bellagi (January 2016)
(King Fahd University of Petroleum & Minerals, KSA; University of Monastir, Tunisia)
Open content licensed under CC BY-NC-SA
Snapshots

Details
References
[1] R. Aris and N. R. Amundson, "An Analysis of Chemical Reactor Stability and Control—I: The Possibility of Local Control, with Perfect or Imperfect Control Mechanisms," Chemical Engineering Science, 7(3), 1958 pp. 121–131. doi:10.1016/0009-2509(58)80019-6.
[2] R. Aris and N. R. Amundson, "An Analysis of Chemical Reactor Stability and Control—II: The Evolution of Proportional Control", Chemical Engineering Science, 7(3), 1958 pp. 132–147. doi:10.1016/0009-2509(58)80020-2.
[3] R. Aris and N. R. Amundson, "An Analysis of Chemical Reactor Stability and Control—III: The Principles of Programming Reactor Calculations. Some Extensions", Chemical Engineering Science, 7(3), 1958 pp. 148–155. doi:10.1016/0009-2509(58)80021-4.
[4] R. Luus and L. Lapidus, "The Control of Nonlinear Systems. Part II: Convergence by Combined First and Second Variations," AIChE Journal, 13(1), 1967 pp. 108–113. doi:10.1002/aic.690130120.
[5] D. E. Kirk, Optimal Control Theory: An Introduction, Mineola, NY: Dover Publications, 2004.
Permanent Citation
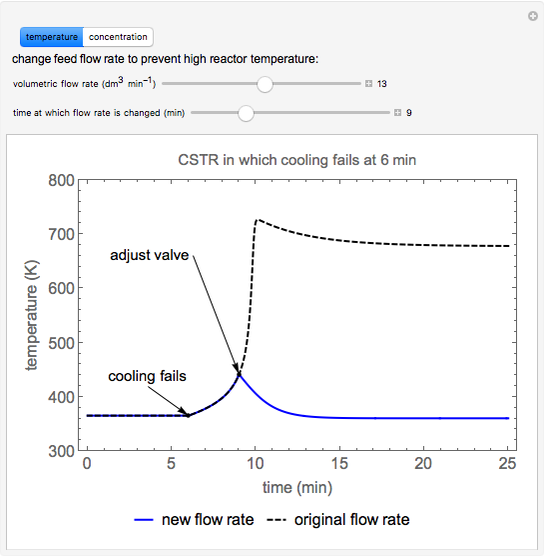 Continuous Stirred-Tank Reactor That Loses Cooling
Continuous Stirred-Tank Reactor That Loses Cooling
Rachael L. Baumann Inhibition of Enzyme Reactions in Continuous Stirred-Tank Reactor and Batch Reactor
Inhibition of Enzyme Reactions in Continuous Stirred-Tank Reactor and Batch Reactor
Rachael L. Baumann Multiple Steady States in a Continuous Stirred-Tank Reactor with Heat Exchange
Multiple Steady States in a Continuous Stirred-Tank Reactor with Heat Exchange
Rachael L. Baumann Nonadiabatic Tubular Reactor with Recycle
Nonadiabatic Tubular Reactor with Recycle
Housam Binous, Abdullah A. Shaikh, and Ahmed Bellagi Nonadiabatic Tubular Reactor with Negligible Mass Dispersion
Nonadiabatic Tubular Reactor with Negligible Mass Dispersion
Housam Binous, Abdullah A. Shaikh, and Ahmed Bellagi Adiabatic Plug Flow Reactor with Recycle
Adiabatic Plug Flow Reactor with Recycle
Rachael L. Baumann Reversible Reaction in an Adiabatic Plug-Flow Reactor
Reversible Reaction in an Adiabatic Plug-Flow Reactor
Rachael L. Baumann Effect of Tube Diameter on Plug Flow Reactor
Effect of Tube Diameter on Plug Flow Reactor
Rachael L. Baumann Volumetric Flow Rates in a Plug Flow Reactor
Volumetric Flow Rates in a Plug Flow Reactor
Rachael L. Baumann and Adam J. Johnston Langmuir-Hinshelwood Reaction in a Plug Flow Reactor
Langmuir-Hinshelwood Reaction in a Plug Flow Reactor
Garrison J. Vigil
-
 Liquid-Liquid Equilibrium for the 1-Butanol-Water System
Liquid-Liquid Equilibrium for the 1-Butanol-Water System
Ahmed Bellagi -
 Temperature Dependence of Dehydrogenation of Ethyl Benzene to Styrene
Temperature Dependence of Dehydrogenation of Ethyl Benzene to Styrene
Ahmed Bellagi -
 Deconvolution of a Chromatogram
Deconvolution of a Chromatogram
Ahmed Bellagi -
 Design of a Shell and Tube Heat Exchanger
Design of a Shell and Tube Heat Exchanger
Ahmed Bellagi -
 Correction Factor for Shell and Tube Heat Exchanger
Correction Factor for Shell and Tube Heat Exchanger
Ahmed Bellagi -
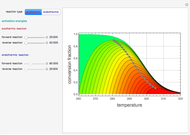 Contour Plots for Reaction Rates
Contour Plots for Reaction Rates
Ahmed Bellagi -
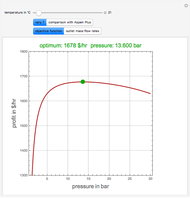 Optimal Conditions for CO2/n-Hexane Flash Separation
Optimal Conditions for CO2/n-Hexane Flash Separation
Ahmed Bellagi -
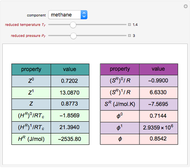
 Residual Functions for the SRK and PR Equations of State
Residual Functions for the SRK and PR Equations of State
Ahmed Bellagi -
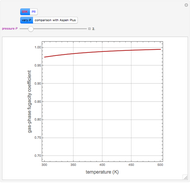 Gas-Phase Fugacity Coefficients for Propylene
Gas-Phase Fugacity Coefficients for Propylene
Ahmed Bellagi -
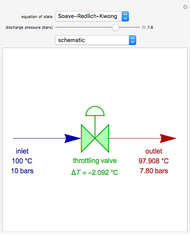 Operation of a Throttling Valve
Operation of a Throttling Valve
Ahmed Bellagi -
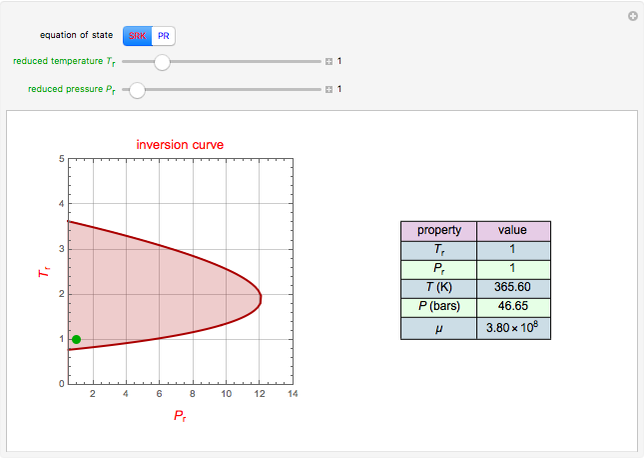 Joule-Thomson Inversion Curves for Soave-Redlich-Kwong (SRK) and Peng-Robinson (PR) Equations of State
Joule-Thomson Inversion Curves for Soave-Redlich-Kwong (SRK) and Peng-Robinson (PR) Equations of State
Ahmed Bellagi -
 Lee-Kesler Generalized Correlations for Gases
Lee-Kesler Generalized Correlations for Gases
Ahmed Bellagi -
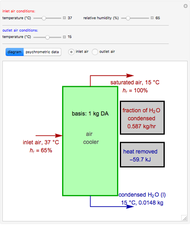 Operation of an Air Conditioner
Operation of an Air Conditioner
Ahmed Bellagi -
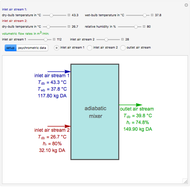 Adiabatic Mixing of Two Moist Air Streams
Adiabatic Mixing of Two Moist Air Streams
Ahmed Bellagi -
 Adiabatic Humidification
Adiabatic Humidification
Ahmed Bellagi -
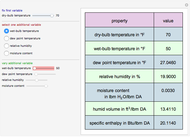 Psychrometric Data Calculator in English Engineering Units
Psychrometric Data Calculator in English Engineering Units
Ahmed Bellagi -
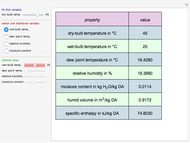 Psychrometric Data Calculator in SI Units
Psychrometric Data Calculator in SI Units
Ahmed Bellagi -
 Concentration of Sugar Solution in a Bubble Column
Concentration of Sugar Solution in a Bubble Column
Ahmed Bellagi -
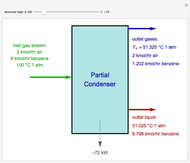 Operation of a Partial Condenser
Operation of a Partial Condenser
Ahmed Bellagi -
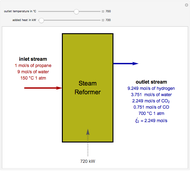 Steam Reforming of Propane
Steam Reforming of Propane
Ahmed Bellagi