A Gravitational Optimization Problem



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
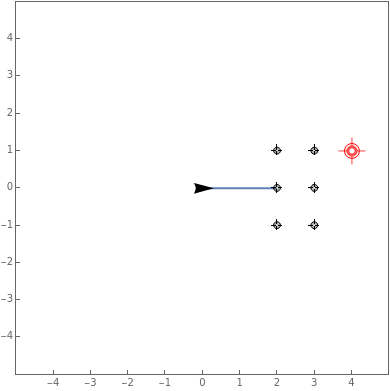
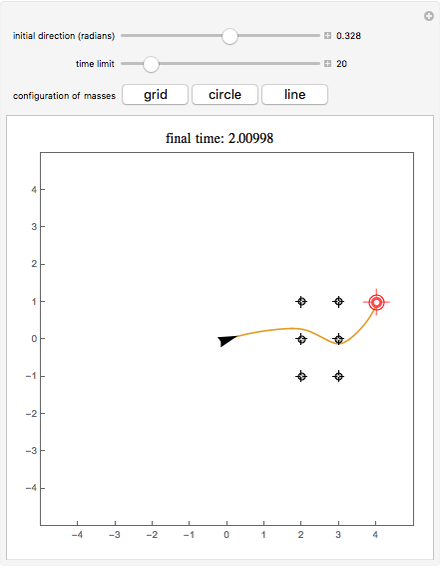
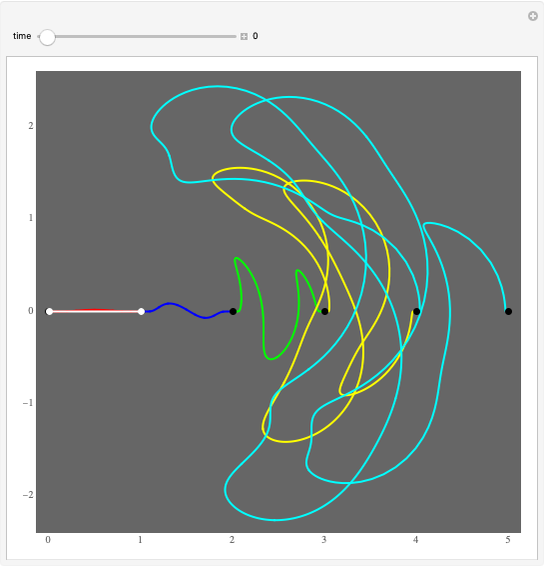
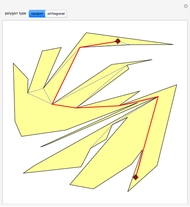
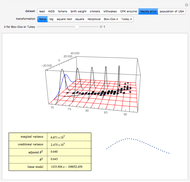
Consider a collection of fixed particles of mass 1 at prescribed positions (shown as black locators). Another particle of mass 1 starts at  with velocity 1 in a direction θ (counterclockwise from the
with velocity 1 in a direction θ (counterclockwise from the  axis). It then travels according to Newton's laws, subject to an inverse-square force of magnitude
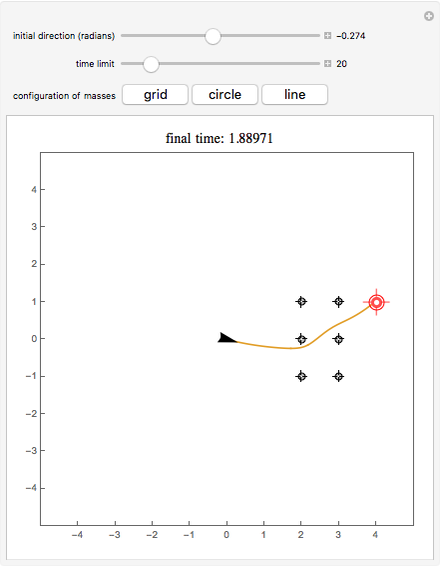
axis). It then travels according to Newton's laws, subject to an inverse-square force of magnitude  from each of the fixed masses. What is the shortest time in which the moving particle can be made to reach a prescribed target (the red locator)? This Demonstration lets you vary the initial direction to thereby find an approximate value of the optimal angle and minimum time by trial and error.
from each of the fixed masses. What is the shortest time in which the moving particle can be made to reach a prescribed target (the red locator)? This Demonstration lets you vary the initial direction to thereby find an approximate value of the optimal angle and minimum time by trial and error.
Contributed by: Antonín Slavík and Stan Wagon (April 2014)
(Charles University, Prague and Macalester College, St. Paul, Minnesota)
Open content licensed under CC BY-NC-SA
Snapshots

Details
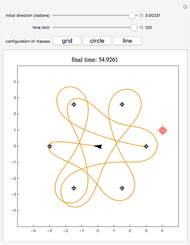
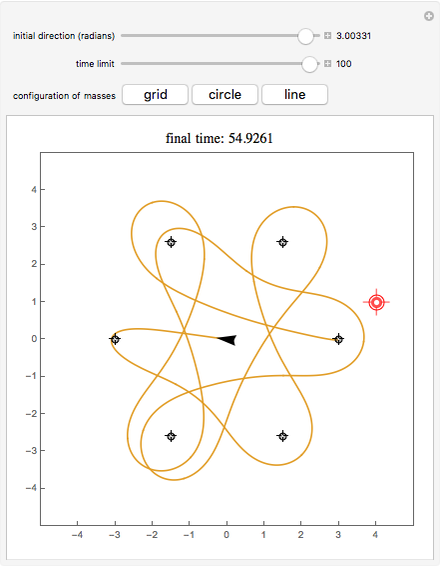
The trajectory is calculated numerically and the motion stops as soon as the moving particle hits the target or one of the fixed masses, or if the prescribed time limit is exceeded. You can change the positions of the fixed particles as well as the target by dragging the mouse or by choosing one of the predefined configurations. It is also possible to add fixed particles by ⌘-clicking or Alt-clicking, or to remove them by holding the shift key.
The default grid configuration has fixed masses at positions  ,
,  ,
,  ,
,  ,
,  ,
,  , and the target at position
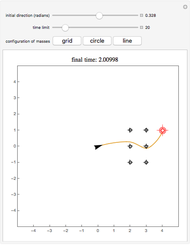
, and the target at position  ; this problem appeared in Appendix D of [1]. The optimal solution (shown in the first snapshot) is approximately
; this problem appeared in Appendix D of [1]. The optimal solution (shown in the first snapshot) is approximately  with the final time
with the final time  ; this fact can be verified by a numerical minimization procedure.
; this fact can be verified by a numerical minimization procedure.
Reference
[1] F. Bornemann, D. Laurie, S. Wagon, and J. Waldvogel, The SIAM 100-Digit Challenge: A Study in High-Accuracy Numerical Computing, Philadelphia: Society for Industrial and Applied Mathematics, 2004.
Permanent Citation
 Gravitational Interaction Simulator
Gravitational Interaction Simulator
Sharad Vikram Gravitational Wave Frequency Distribution for Two Orbiting Point Particles
Gravitational Wave Frequency Distribution for Two Orbiting Point Particles
Satya Mohapatra Scalogram of Gravitational Wave from a Binary Black Hole Inspiral
Scalogram of Gravitational Wave from a Binary Black Hole Inspiral
Satya Mohapatra Binary Inspiral Gravitational Waves from a Post-Newtonian Expansion
Binary Inspiral Gravitational Waves from a Post-Newtonian Expansion
Leo C. Stein Restricted Three-Body Problem in a Plane
Restricted Three-Body Problem in a Plane
Enrique Zeleny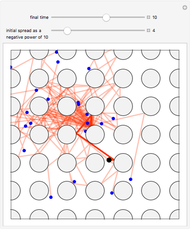 Following Chaotic Reflections
Following Chaotic Reflections
Stan Wagon (Macalester College) Gravitational Potential of a Cuboid
Gravitational Potential of a Cuboid
Franz Krafft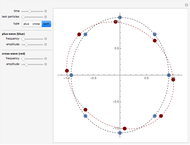 Gravitational Wave Polarization and Test Particles
Gravitational Wave Polarization and Test Particles
Joel Frederico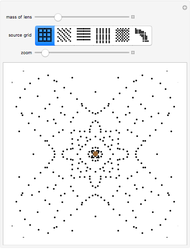 Gravitational Lensing of a Point Source
Gravitational Lensing of a Point Source
Rob Morris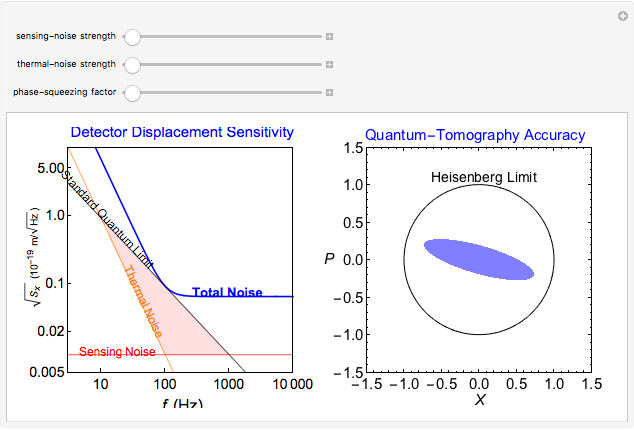 Probing Macroscopic Quantum States with Gravitational-Wave Detectors
Probing Macroscopic Quantum States with Gravitational-Wave Detectors
Haixing Miao, Stefan Danilishin, Helge Muller-Ebhardt, Henning Rehbein, Kentaro Somiya, and Yanbei Chen
-
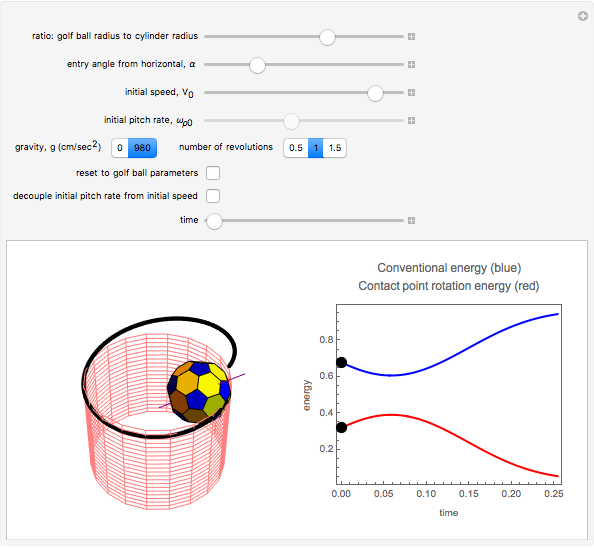 Rolling Ball inside a Cylinder
Rolling Ball inside a Cylinder
Stan Wagon -
 3D Billiard Loop in a Rectangular Box
3D Billiard Loop in a Rectangular Box
Stan Wagon -
 Flying to the Moon
Flying to the Moon
Stan Wagon -
 Discus Flight
Discus Flight
Stan Wagon -
 Bicycle or Unicycle Tracks?
Bicycle or Unicycle Tracks?
Stan Wagon -
 Paths inside a Polygon
Paths inside a Polygon
Stan Wagon -
 Penrose's Train Challenge
Penrose's Train Challenge
Stan Wagon -
 Bishop Edge Coloring
Bishop Edge Coloring
Stan Wagon -
 Simpson's Paradox
Simpson's Paradox
Stan Wagon -
 Regression Model with Transformations
Regression Model with Transformations
Stan Wagon -
 Perfect 1-Factorizations of Graphs
Perfect 1-Factorizations of Graphs
Stan Wagon -
 The Banach-Tarski Paradox
The Banach-Tarski Paradox
Stan Wagon -
 Spinning Out Sine and Cosine
Spinning Out Sine and Cosine
Stan Wagon -
 Benford's Law and Data Spread
Benford's Law and Data Spread
Stan Wagon -
 The Routing Problem
The Routing Problem
Stan Wagon -
 Solving Decanting Problems by Graph Theory
Solving Decanting Problems by Graph Theory
Stan Wagon -
 Four-Coloring Planar Graphs
Four-Coloring Planar Graphs
Stan Wagon -
 A Gravitational Optimization Problem
A Gravitational Optimization Problem
Stan Wagon -
 Tetrahedral Loops
Tetrahedral Loops
Stan Wagon -
 The Disappearing Hyperbolic Squares
The Disappearing Hyperbolic Squares
Stan Wagon