Mechanical Sensitivity of Soft Testing Machines




Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
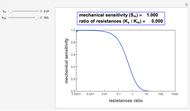
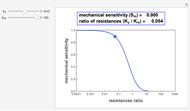
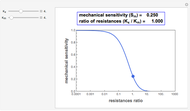
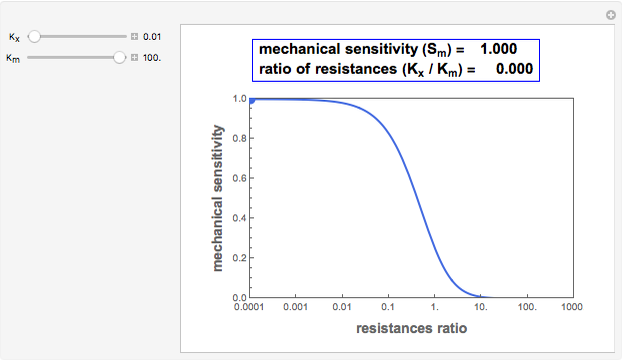
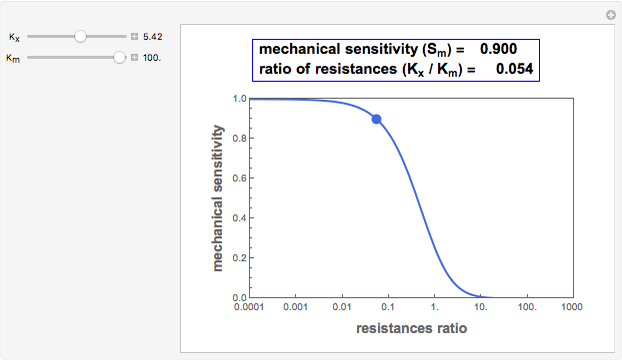
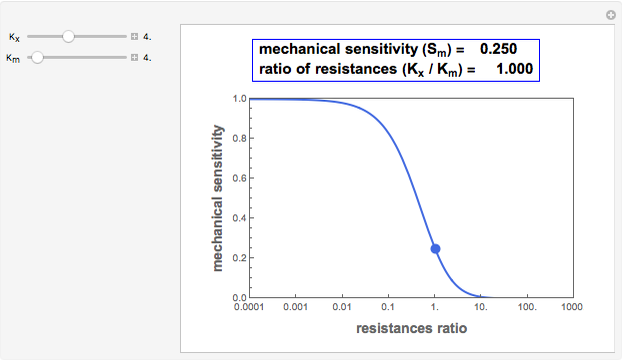
This Demonstration illustrates how the mechanical sensitivity of a testing machine is affected by the ratio of the stiffness of the specimen to that of the machine. An idealized situation is considered, in which both the machine and the specimen have constant stiffness. The mechanical sensitivity is defined as the ratio of the change in resistance of the machine-specimen array to that of the specimen alone.
Contributed by: Mark D. Normand and Micha Peleg (March 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
Snapshot 1: stiff machine operating in its designed load range
Snapshot 2: stiff machine operating outside its designed load range
Snapshot 3: soft machine sensing a specimen whose stiffness is comparable to its own
Snapshot 4: soft machine sensing a specimen whose stiffness is much greater than its own
Man-made mechanical testing machines are deliberately constructed from very stiff (rigid) materials. Thus, when operating within its designed load range the machine's own deformability is negligible relative to that of the tested specimen. This is not the case in human sensory systems, for example, the fingers, in which the object being sensed can be of comparable or even higher stiffness. For simplicity, we assume that the machine has a constant mechanical resistance,  , and the specimen a constant mechanical resistance,
, and the specimen a constant mechanical resistance,  , both in arbitrary units. Since the two are in series, the mechanical resistance of the array,
, both in arbitrary units. Since the two are in series, the mechanical resistance of the array,  , equals
, equals  . We define the mechanical sensitivity,
. We define the mechanical sensitivity,  , as
, as  . ( should not be confused with the detection threshold, which is determined by other factors.)
. ( should not be confused with the detection threshold, which is determined by other factors.)
This Demonstration calculates and displays the value of the mechanical sensitivity, , and plots it versus the / ratio.
Note that the mechanical sensitivity can also be defined in other ways and that when it comes to fingers, for example, neither nor needs to remain constant. For details see the reference:
M. Peleg and O. H. Campanella, "The Mechanical Sensitivity of Soft Compressible Testing Machines", Journal of Rheology, 33(3), 1989 pp. 455–467.
Permanent Citation
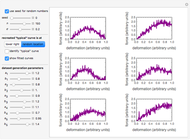 Simulated Jagged Force-Displacement Curves
Simulated Jagged Force-Displacement Curves
Mark D. Normand and Micha Peleg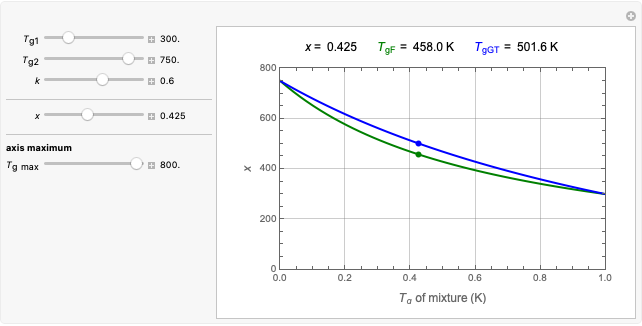 Gordon-Taylor and Fox Equations for Glass Transition Temperature
Gordon-Taylor and Fox Equations for Glass Transition Temperature
Mark D. Normand and Micha Peleg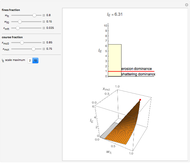 Erosion Index for Particulates
Erosion Index for Particulates
Mark D. Normand and Micha Peleg Lubricated and Frictional Squeezing Flow
Lubricated and Frictional Squeezing Flow
Mark D. Normand and Micha Peleg Comparing Measures of Line Jaggedness
Comparing Measures of Line Jaggedness
Mark D. Normand and Micha Peleg Compressive Stress-Strain Relationships of Layered Solid Foams
Compressive Stress-Strain Relationships of Layered Solid Foams
Christina S. Barsa, Mark D. Normand, and Micha Peleg Fourier Power Spectrum as a Measure of Line Jaggedness
Fourier Power Spectrum as a Measure of Line Jaggedness
Mark D. Normand and Micha Peleg Expanded Magnitude Estimation Method
Expanded Magnitude Estimation Method
Mark D. Normand and Micha Peleg Corrosion Mechanism for Stainless Steel
Corrosion Mechanism for Stainless Steel
Quang-Dao Trinh A Contact Element in Rheological Models
A Contact Element in Rheological Models
Mark D. Normand and Micha Peleg
-
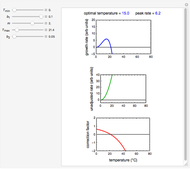 Ratkowski's Square Root Growth Rate Model for High Temperatures
Ratkowski's Square Root Growth Rate Model for High Temperatures
Micha Peleg -
Gordon-Taylor and Fox Equations for Glass Transition Temperature
Micha Peleg -
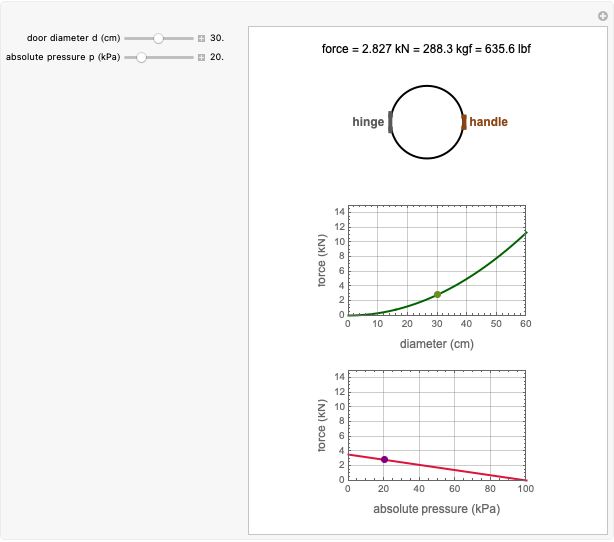 Force to Overcome Vacuum Pull
Force to Overcome Vacuum Pull
Micha Peleg -
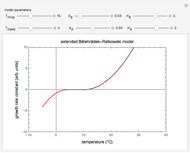 Extending the Square Root Growth Rate Model to Lethal Low Temperatures
Extending the Square Root Growth Rate Model to Lethal Low Temperatures
Micha Peleg -
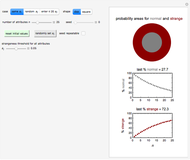 Probability of Being Strange According to Paulos
Probability of Being Strange According to Paulos
Micha Peleg -
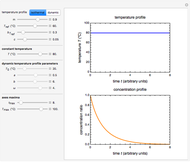
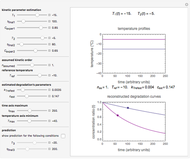
 Successive Three-Point Method for Weibullian Chemical Degradation
Successive Three-Point Method for Weibullian Chemical Degradation
Micha Peleg -
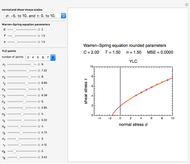 Estimating Cohesion and Tensile Strength of Compacted Powders
Estimating Cohesion and Tensile Strength of Compacted Powders
Micha Peleg -
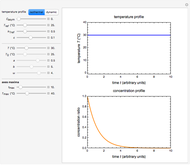
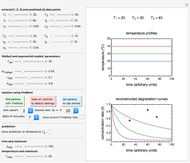 Three-Endpoints Method for Isothermal Weibullian Chemical Degradation
Three-Endpoints Method for Isothermal Weibullian Chemical Degradation
Micha Peleg -
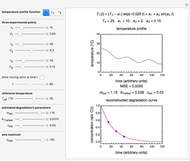
 Vitamin C Loss in Foods During Heat Processing and Storage
Vitamin C Loss in Foods During Heat Processing and Storage
Micha Peleg -
 Parameterizing Temperature-Viscosity Relations
Parameterizing Temperature-Viscosity Relations
Micha Peleg -
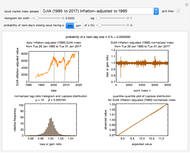 Laplace Distribution in Fluctuating Stock Index Records
Laplace Distribution in Fluctuating Stock Index Records
Micha Peleg -
 Weibullian Chemical Degradation
Weibullian Chemical Degradation
Micha Peleg -
 Simulating Ascorbic Acid Degradation
Simulating Ascorbic Acid Degradation
Micha Peleg -
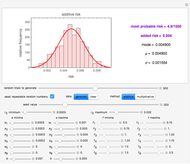 Additive and Multiplicative Risks
Additive and Multiplicative Risks
Micha Peleg -
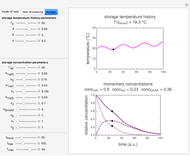
 Endpoints Method for Predicting Chemical Degradation in Frozen Foods
Endpoints Method for Predicting Chemical Degradation in Frozen Foods
Micha Peleg -
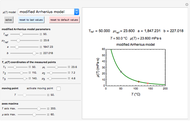
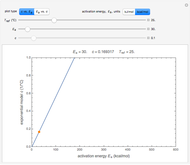 Exponential Model for Arrhenius Activation Energy
Exponential Model for Arrhenius Activation Energy
Micha Peleg -
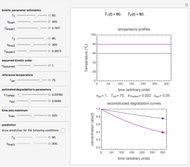 Prediction of Isothermal Degradation by the Endpoints Method
Prediction of Isothermal Degradation by the Endpoints Method
Micha Peleg -
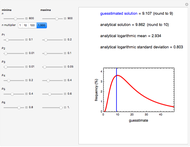 Risk Guesstimation from Factor Ranges
Risk Guesstimation from Factor Ranges
Micha Peleg -
 Volatiles Formation Kinetics in Stored Fish
Volatiles Formation Kinetics in Stored Fish
Micha Peleg -
 Comparison of Six Sigmoid Growth Curve Models
Comparison of Six Sigmoid Growth Curve Models
Micha Peleg