Smoothly Interpolating a Set of Data



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
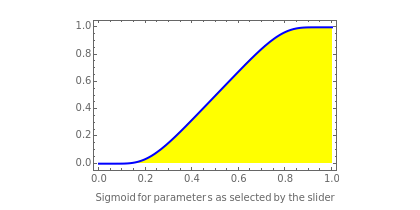
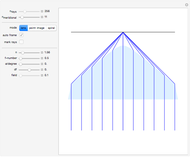
This Demonstration lets you compare piecewise quadratic interpolation with a little-known variation of it that always gives a smooth interpolation function. This means that for this function derivatives of all orders exist. Smoothness is achieved by joining neighboring quadratic interpolation polynomials by means of a smooth sigmoid function  that depends on a positive parameter
that depends on a positive parameter  . This sigmoid is given by a surprisingly simple formula:
. This sigmoid is given by a surprisingly simple formula:

Contributed by: Ulrich Mutze (November 2010)
Based on a program by: Stephen Wolfram
Open content licensed under CC BY-NC-SA
Snapshots





Details
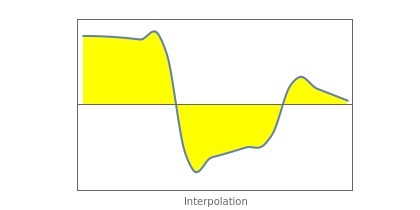
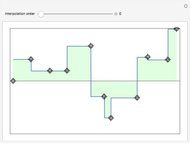
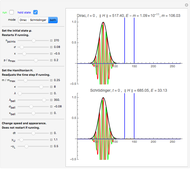
Snapshot 1: piecewise quadratic interpolation, as implemented here by the Mathematica function Interpolation may result in kinks
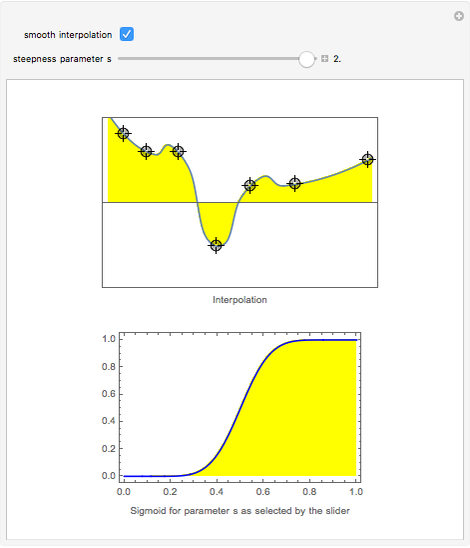
Snapshot 2: no kinks with the smooth version
Snapshots 3 and 4 show the lowest considered value and the largest considered value of the sigmoid's steepness parameter in action. The preferred value 0.81 (more precisely 0.810747) of this parameter minimizes the integral of the square of the second derivative (i.e. the total kinetic energy in a quantum analogy) of the sigmoid.
The proposed interpolation method is basically twice as expensive as piecewise quadratic interpolation. It is thus a computationally very cheap method and gives perfectly smooth curves and, unlike spline methods, needs no preparatory run. The method of switching softly from one local data set to the next by means of a smooth sigmoid can also be used for higher-order local interpolation or even for rational interpolation instead of polynomial interpolation. A historical note: These generalizations are worked out in detail in the Kodak (European Research) Technical Report, Ulrich Mutze, "Smooth Interpolation through Many Points via Partition of Unity," Accession No. 278844A, Date 09/24/1992, which is not publicly available. A short presentation of the second order polynomial method can be found on page 4 of Ulrich Mutze, "A Simple Variational Integrator for General Holonomic Mechanical Systems," 2003 at http://www.ma.utexas.edu/mp_arc/c/03/03-491.pdf. It differs in the treatment of the boundaries of the data, in that it switches smoothly to linear interpolation there that, as a rule, is more useful for extrapolation. In the present work such a finesse would complicate the comparison with the nonsmooth method.
The proposed sigmoid function is remarkable since it is smooth and nevertheless grows from 0 to 1 in a compact interval (which here is [0,1]). Therefore, it can conveniently replace the nonsmooth sigmoids in fuzzy logic and in wavelets.
Permanent Citation
 Interpolating a Set of Data
Interpolating a Set of Data
Stephen Wolfram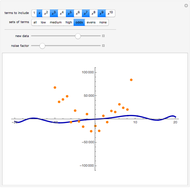 Fitting Noisy Data
Fitting Noisy Data
Rob Morris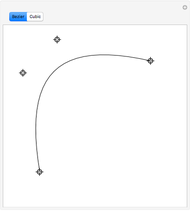 Simple Spline Curves
Simple Spline Curves
Richard Phillips and Rob Morris Frequency Spectrum of a Noisy Signal
Frequency Spectrum of a Noisy Signal
Jon McLoone Two Dice with Histogram
Two Dice with Histogram
Abby Brown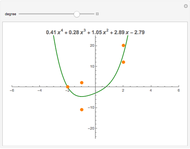 Fitting a Curve to Five Points
Fitting a Curve to Five Points
Rob Morris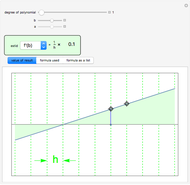 Using Sampled Data to Estimate Derivatives, Integrals, and Interpolated Values
Using Sampled Data to Estimate Derivatives, Integrals, and Interpolated Values
Robert L. Brown Linear and Quadratic Curve Fitting Practice
Linear and Quadratic Curve Fitting Practice
Jon McLoone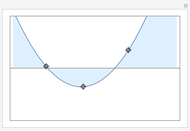 Interpolating Polynomial
Interpolating Polynomial
Stephen Wolfram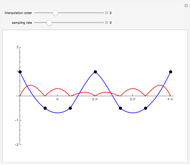 Data Sampling and Interpolation
Data Sampling and Interpolation
Brian Van Vertloo
-
 Simulating Real Gases in 2D
Simulating Real Gases in 2D
Ulrich Mutze -
 Testing Second-Order Integrators for Motion of a Charge in a Homogeneous Magnetic Field
Testing Second-Order Integrators for Motion of a Charge in a Homogeneous Magnetic Field
Ulrich Mutze -
 The Thomson Problem with Central Forces
The Thomson Problem with Central Forces
Ulrich Mutze -
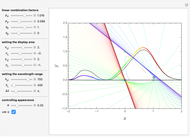 Standard Colorimetric Observer Color-Matching Functions
Standard Colorimetric Observer Color-Matching Functions
Ulrich Mutze -
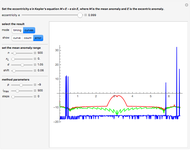 Iteration Methods for Solving Kepler's Equation
Iteration Methods for Solving Kepler's Equation
Ulrich Mutze -
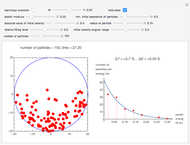 Approach of a System of Particles towards Thermal Equilibrium
Approach of a System of Particles towards Thermal Equilibrium
Ulrich Mutze -
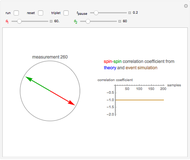 Monte Carlo Simulation of Two-Electron Spin Correlations
Monte Carlo Simulation of Two-Electron Spin Correlations
Ulrich Mutze -
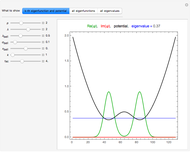 Eigenfunctions of a 1D Quantum System with Adjustable Potential
Eigenfunctions of a 1D Quantum System with Adjustable Potential
Ulrich Mutze -
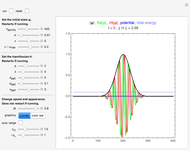 Quantum Dynamics in 1D
Quantum Dynamics in 1D
Ulrich Mutze -
 Lens Aberrations
Lens Aberrations
Ulrich Mutze -
 On the Stability Limit of Leapfrog Methods
On the Stability Limit of Leapfrog Methods
Ulrich Mutze -
 Smoothly Interpolating a Set of Data
Smoothly Interpolating a Set of Data
Ulrich Mutze -
 Swingboat Ride
Swingboat Ride
Ulrich Mutze -
 The Gravitational Two-Body Problem in the Einstein-Infeld-Hoffmann Approximation
The Gravitational Two-Body Problem in the Einstein-Infeld-Hoffmann Approximation
Ulrich Mutze -
 Contracting the Double-Twist in SO(3)
Contracting the Double-Twist in SO(3)
Ulrich Mutze -
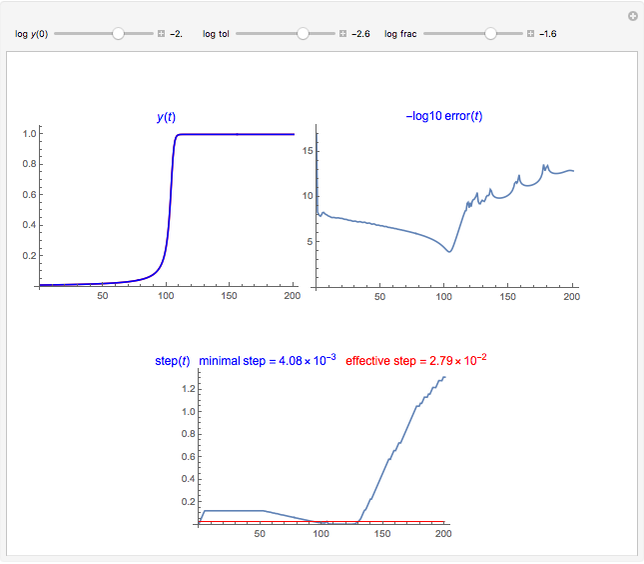 The Asynchronous Leapfrog Method as a Stiff ODE Solver
The Asynchronous Leapfrog Method as a Stiff ODE Solver
Ulrich Mutze -
 Model for Crystallization in 2D
Model for Crystallization in 2D
Ulrich Mutze -
 Time Evolution of a Symmetric System
Time Evolution of a Symmetric System
Ulrich Mutze -
 Relativistic Quantum Dynamics in 1D and the Klein Paradox
Relativistic Quantum Dynamics in 1D and the Klein Paradox
Ulrich Mutze -
 The Uranus Puzzle
The Uranus Puzzle
Ulrich Mutze