On the Stability Limit of Leapfrog Methods



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
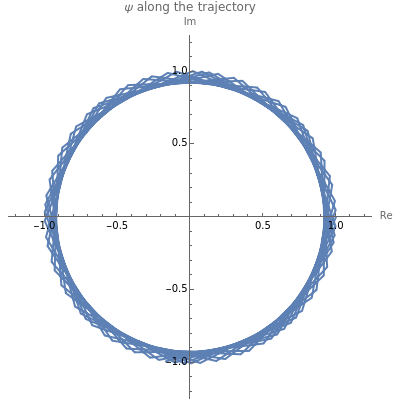
We study two leapfrog algorithms by applying them to the simple ordinary differential equation  with the initial value
with the initial value  . The exact solution obviously is
. The exact solution obviously is  for all real
for all real  and thus represents a rotation with angular velocity
and thus represents a rotation with angular velocity  . In our context the significance of this equation is that it is the most general Schrödinger equation in a one-dimensional Hilbert space. Spectral decomposition allows any Schrödinger equation in a finite-dimensional Hilbert space to reduce to a finite set of copies of this case. The numerical solutions under consideration work in a two-dimensional Hilbert space formed by pairs
. In our context the significance of this equation is that it is the most general Schrödinger equation in a one-dimensional Hilbert space. Spectral decomposition allows any Schrödinger equation in a finite-dimensional Hilbert space to reduce to a finite set of copies of this case. The numerical solutions under consideration work in a two-dimensional Hilbert space formed by pairs  , where the second component is defined to have the initial value
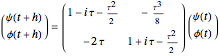
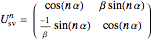
, where the second component is defined to have the initial value  . In this two-dimensional Hilbert space a time-stepping evolution algorithm is given in terms of a step matrix that in this case is a complex 2×2-matrix, the matrix elements of which are specified functions of the time step
. In this two-dimensional Hilbert space a time-stepping evolution algorithm is given in terms of a step matrix that in this case is a complex 2×2-matrix, the matrix elements of which are specified functions of the time step  . In our case we have:
. In our case we have:











Contributed by: Ulrich Mutze (September 2011)
Open content licensed under CC BY-NC-SA
Snapshots
Details
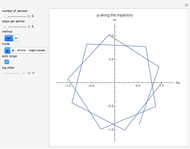
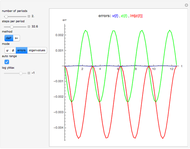
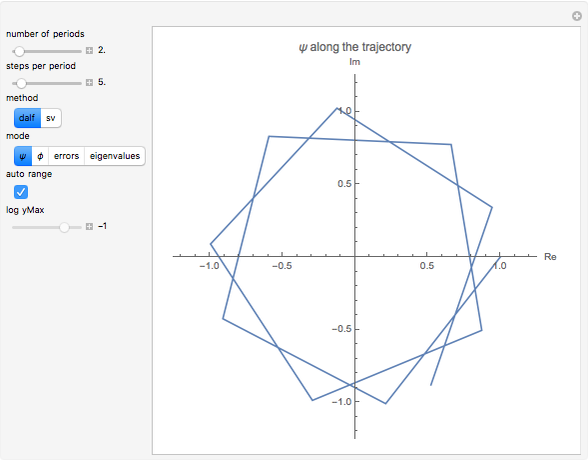
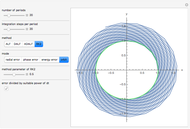
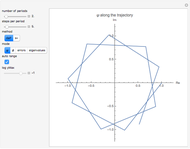
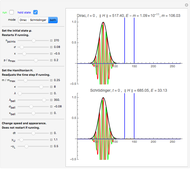
Snapshot 1: for only a few steps per rotation the trajectory is polygonal; the corresponding graphics for method sv give a more oblate, less circular trajectory
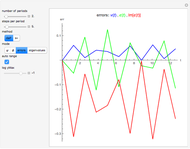
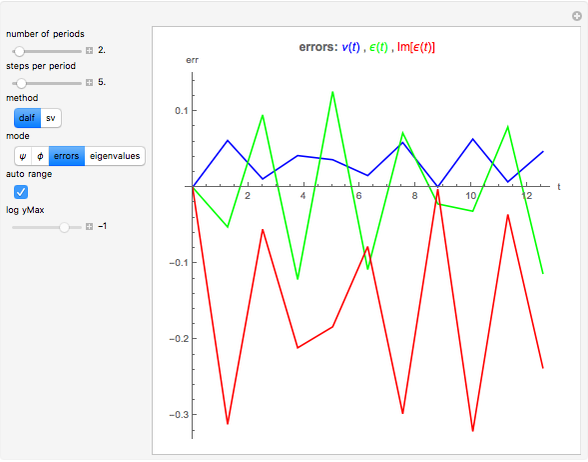
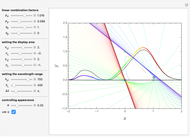
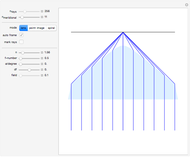
Snapshot 2: error curves for the same trajectory as snapshot 1
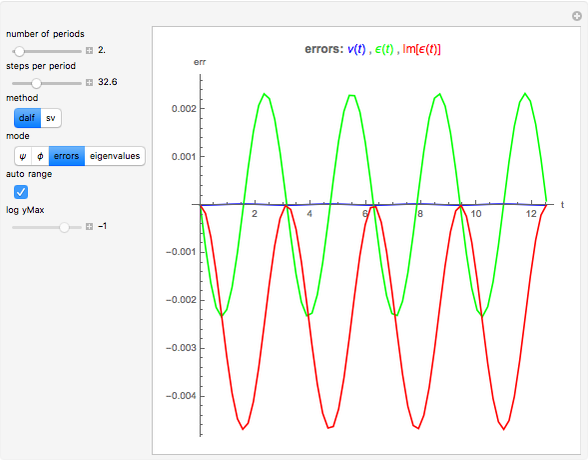
Snapshot 3: many steps per period create smooth error curves and trajectories
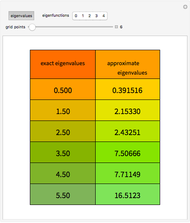
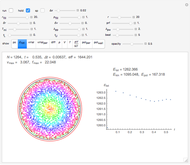
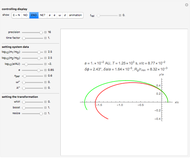
Snapshot 4: eigenvalues of the step matrix for a stable trajectory
Snapshot 5: eigenvalues of the step matrix for an exploding trajectory
This Demonstration builds trajectories by iterated application of the step matrix on states, starting from some initial state. In the present simple case, however, it is also possible to compute the generic  power of the step matrix as a symbolic expression. For the Störmer–Verlet method this was done in [1, 2].
power of the step matrix as a symbolic expression. For the Störmer–Verlet method this was done in [1, 2].
For the densified asynchronous leapfrog method, corresponding results follow from the fact that the step matrices  and
and  of the two methods, as given explicitly earlier, satisfy
of the two methods, as given explicitly earlier, satisfy  with the invertible matrix
with the invertible matrix  . In particular, the eigenvalues of the step matrices are the same. Let us collect the main formulas that hold for
. In particular, the eigenvalues of the step matrices are the same. Let us collect the main formulas that hold for  :
:
 where
where  and
and  with
with  .
.
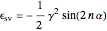
For the error functions  and
and  (for
(for  ) this implies
) this implies
 ,
,
 .
.
The similarity of the step matrices by matrix  implies the relations of the error functions for the two integration methods:
implies the relations of the error functions for the two integration methods:
 ,
,
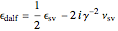 .
.
As carried out in [1, 2], all these equations remain valid when the real number  is replaced by the Hamiltonian operator and the definition of the and functions is understood as implying the scalar products with respect to the initial state of a trajectory. If you want to see the reasons behind the particular step matrices, inspect the code that defines them as a product of simple building blocks in accordance with the basic leapfrog idea.
is replaced by the Hamiltonian operator and the definition of the and functions is understood as implying the scalar products with respect to the initial state of a trajectory. If you want to see the reasons behind the particular step matrices, inspect the code that defines them as a product of simple building blocks in accordance with the basic leapfrog idea.
References
[1] U. Mutze, "The Direct Midpoint Method as a Quantum Mechanical Integrator." http://www.ma.utexas.edu/mp_arc/c/06/06-356.pdf.
[2] U. Mutze, "The Direct Midpoint Method as a Quantum Mechanical Integrator II." http://www.ma.utexas.edu/mp_arc/c/07/07-176.pdf.
Permanent Citation
 Eigenstates of the Quantum Harmonic Oscillator Using Spectral Methods
Eigenstates of the Quantum Harmonic Oscillator Using Spectral Methods
Housam Binous Soliton Trajectories for the Kadomtsev-Petviashvili Equation
Soliton Trajectories for the Kadomtsev-Petviashvili Equation
Klaus von Bloh Schrödinger Wavefunctions in a Continuously Varying Potential
Schrödinger Wavefunctions in a Continuously Varying Potential
Srivishnupreeth Rendla Trajectories of a Solitary Wave for the KdV Equation with Variable Coefficients
Trajectories of a Solitary Wave for the KdV Equation with Variable Coefficients
Klaus von Bloh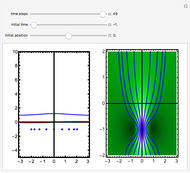 Peregrine Soliton with Controllable Center in the Causal Interpretation of Quantum Mechanics
Peregrine Soliton with Controllable Center in the Causal Interpretation of Quantum Mechanics
Klaus von Bloh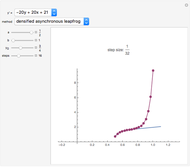 Comparing Leapfrog Methods with Other Numerical Methods for Differential Equations
Comparing Leapfrog Methods with Other Numerical Methods for Differential Equations
Ulrich Mutze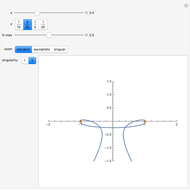 The Quantum-Tobogganic Paths
The Quantum-Tobogganic Paths
Jan Novotny Kakutani's Solution of the Dirichlet Problem
Kakutani's Solution of the Dirichlet Problem
Andrzej Kozlowski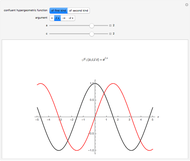 Confluent Hypergeometric Functions
Confluent Hypergeometric Functions
S. M. Blinder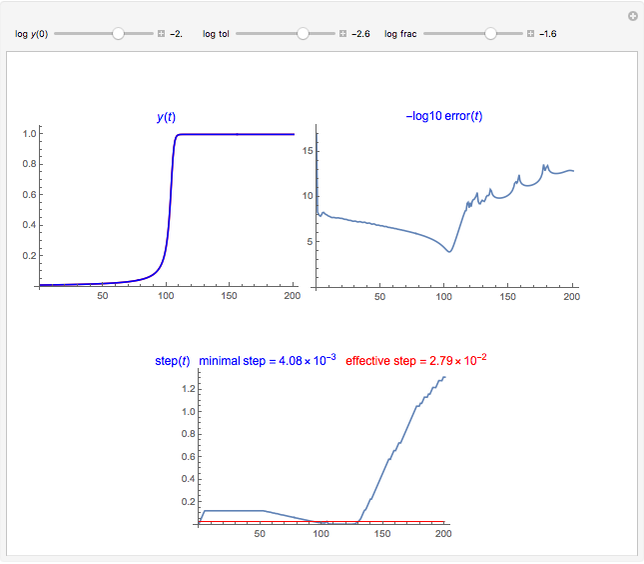 The Asynchronous Leapfrog Method as a Stiff ODE Solver
The Asynchronous Leapfrog Method as a Stiff ODE Solver
Ulrich Mutze
-
 Simulating Real Gases in 2D
Simulating Real Gases in 2D
Ulrich Mutze -
 Testing Second-Order Integrators for Motion of a Charge in a Homogeneous Magnetic Field
Testing Second-Order Integrators for Motion of a Charge in a Homogeneous Magnetic Field
Ulrich Mutze -
 The Thomson Problem with Central Forces
The Thomson Problem with Central Forces
Ulrich Mutze -
 Standard Colorimetric Observer Color-Matching Functions
Standard Colorimetric Observer Color-Matching Functions
Ulrich Mutze -
 Iteration Methods for Solving Kepler's Equation
Iteration Methods for Solving Kepler's Equation
Ulrich Mutze -
 Approach of a System of Particles towards Thermal Equilibrium
Approach of a System of Particles towards Thermal Equilibrium
Ulrich Mutze -
 Monte Carlo Simulation of Two-Electron Spin Correlations
Monte Carlo Simulation of Two-Electron Spin Correlations
Ulrich Mutze -
 Eigenfunctions of a 1D Quantum System with Adjustable Potential
Eigenfunctions of a 1D Quantum System with Adjustable Potential
Ulrich Mutze -
 Quantum Dynamics in 1D
Quantum Dynamics in 1D
Ulrich Mutze -
 Lens Aberrations
Lens Aberrations
Ulrich Mutze -
 On the Stability Limit of Leapfrog Methods
On the Stability Limit of Leapfrog Methods
Ulrich Mutze -
 Smoothly Interpolating a Set of Data
Smoothly Interpolating a Set of Data
Ulrich Mutze -
 Swingboat Ride
Swingboat Ride
Ulrich Mutze -
 The Gravitational Two-Body Problem in the Einstein-Infeld-Hoffmann Approximation
The Gravitational Two-Body Problem in the Einstein-Infeld-Hoffmann Approximation
Ulrich Mutze -
 Contracting the Double-Twist in SO(3)
Contracting the Double-Twist in SO(3)
Ulrich Mutze -
The Asynchronous Leapfrog Method as a Stiff ODE Solver
Ulrich Mutze -
 Model for Crystallization in 2D
Model for Crystallization in 2D
Ulrich Mutze -
 Time Evolution of a Symmetric System
Time Evolution of a Symmetric System
Ulrich Mutze -
 Relativistic Quantum Dynamics in 1D and the Klein Paradox
Relativistic Quantum Dynamics in 1D and the Klein Paradox
Ulrich Mutze -
 The Uranus Puzzle
The Uranus Puzzle
Ulrich Mutze