Spreading Particles in a Disk



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
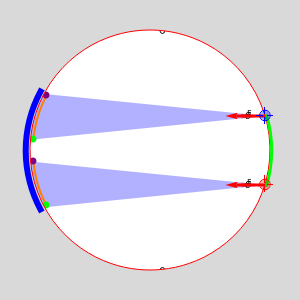
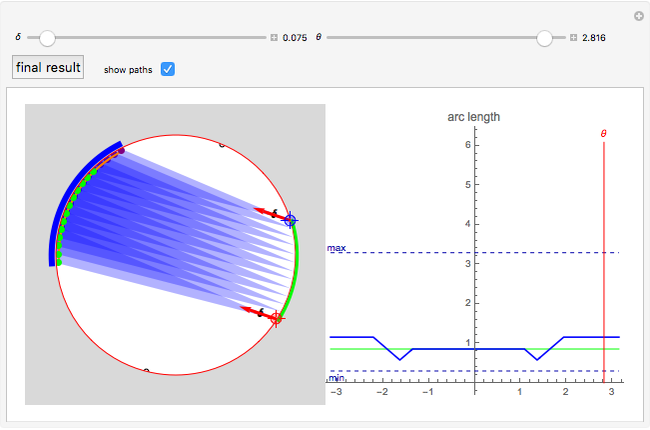
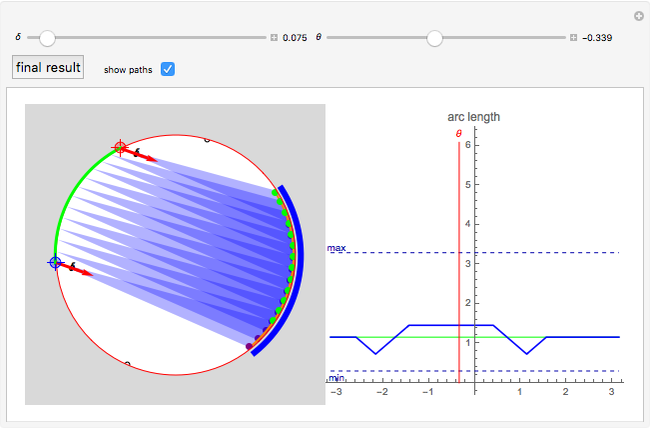
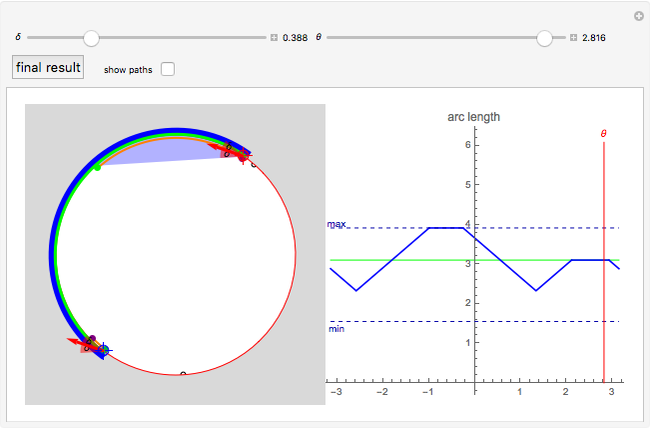
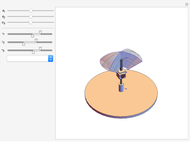
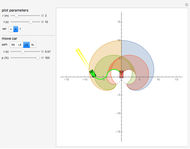
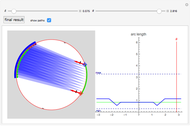
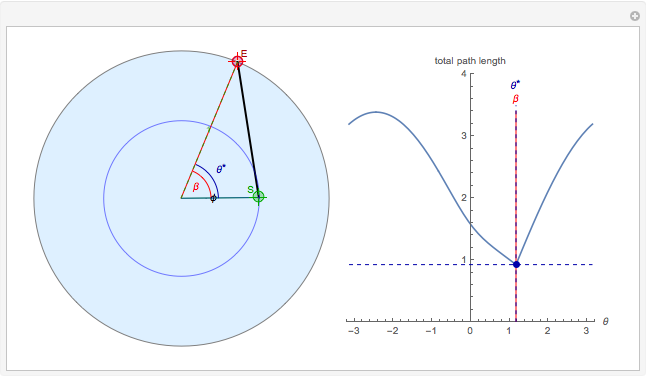
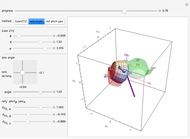
This Demonstration shows particles spreading inside a disk workspace. These might, for example, be magnetized particles inside a Petri dish pushed by an external magnetic field. The particles start along the green arc, bounded by red and blue locators. The propagated particles are pushed in the direction of  and are incident along the arc drawn in blue. Often particles cannot be controlled perfectly, which is modeled by specifying an angular spread
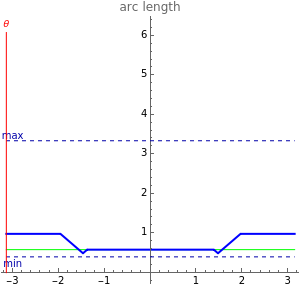
and are incident along the arc drawn in blue. Often particles cannot be controlled perfectly, which is modeled by specifying an angular spread  to either side of . This Demonstration shows the maximum and minimum particle spread (arc length) into which the particles can be manipulated.
to either side of . This Demonstration shows the maximum and minimum particle spread (arc length) into which the particles can be manipulated.
Contributed by: Daniel Bao, Tate Song and Aaron T. Becker (September 2017)
Open content licensed under CC BY-NC-SA
Snapshots
Details
We assume a global input such that the particles start in an arc along the right side of the disk. The left-hand image shows the particle distribution in green as they propagate in the direction, as is shown in blue. The direction is indicated by two red arrows, each starting from either the left or right endpoint of the arc. The particle dispersion is shown with transparent circle sectors, and the path from their current position to an ending arc is shown with a transparent blue sector, which ends along an orange arc whose extent is highlighted by green and purple points. If "show paths" is checked, additional starting points along the current arc are shown.
The arc length may be initialized from 0 to  radians.
radians.
Any initial distribution can be steered to a minimum arc length of  and a maximum arc length of
and a maximum arc length of  . Once the arc length exceeds the minimum, it can never be reduced to less than . Similarly, if the arc length is ever less than the maximum, it can never be increased to more than .
. Once the arc length exceeds the minimum, it can never be reduced to less than . Similarly, if the arc length is ever less than the maximum, it can never be increased to more than .
Every propagation step can add no more than  to the arc length or decrease the arc length by
to the arc length or decrease the arc length by  .
.
This Demonstration was inspired by a similar problem in polygonal workspaces by Lewis and O'Kane [1].
Reference
[1] J. S. Lewis and J. M. O'Kane, "Planning for Provably Reliable Navigation Using an Unreliable, Nearly Sensorless Robot," The International Journal of Robotics Research, 32(11), 2013 pp. 1339–1354. doi:10.1177/0278364913488428.
Permanent Citation
 Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Haoran Zhao and Aaron T. Becker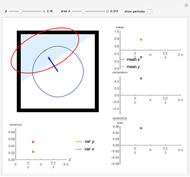 Distribution of a Robot Swarm in a Square under Gravity
Distribution of a Robot Swarm in a Square under Gravity
Haoran Zhao and Aaron T. Becker Contact Angle Relaxation during Droplet Spreading
Contact Angle Relaxation during Droplet Spreading
Brian G. Higgins and Housam Binous Terminal Velocity of Falling Particles
Terminal Velocity of Falling Particles
Clay Gruesbeck Interacting Vortices in a Disk
Interacting Vortices in a Disk
Michael Trott Steady Flow over a Rotating Disk: von Kármán Swirling Flow
Steady Flow over a Rotating Disk: von Kármán Swirling Flow
Brian G. Higgins and Housam Binous Nonstationary Heat and Mass Transfer in a Porous Catalyst Particle
Nonstationary Heat and Mass Transfer in a Porous Catalyst Particle
Housam Binous, Abdullah A. Shaikh, and Ahmed Bellagi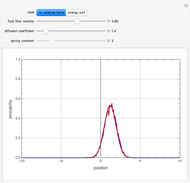 Particle Position Distribution Using a Brownian Dynamic Simulation
Particle Position Distribution Using a Brownian Dynamic Simulation
Housam Binous and Brian G. Higgins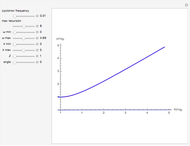 Cold Wave Plasma Dispersion
Cold Wave Plasma Dispersion
Ken Flanagan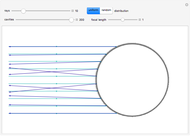 Reflection of Parallel Rays by a Two-Dimensional Body of Nearly Maximal Resistance
Reflection of Parallel Rays by a Two-Dimensional Body of Nearly Maximal Resistance
Paulo D. F. Gouveia
-
Distribution of a Swarm of Robots in a Circular Workplace under Gravity
Aaron T. Becker -
 Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker -
 The Homicidal Chauffeur Problem
The Homicidal Chauffeur Problem
Aaron T. Becker -
 Rapidly Exploring Random Tree (RRT) and RRT*
Rapidly Exploring Random Tree (RRT) and RRT*
Aaron T. Becker -
 Configuration Space for Four-Bar Linkage
Configuration Space for Four-Bar Linkage
Aaron T. Becker -
 Isochrons for a Dubins Car
Isochrons for a Dubins Car
Aaron T. Becker -
 Shortest Path for the Dubins Car
Shortest Path for the Dubins Car
Aaron T. Becker -
 Distance Norms in Robot Workspace and Phase Space
Distance Norms in Robot Workspace and Phase Space
Aaron T. Becker -
 Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker -
 Spreading Particles in a Disk
Spreading Particles in a Disk
Aaron T. Becker -
 Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Shortest Path between Two Points in the Unit Disk Reflecting off the Circumference
Aaron T. Becker -
 Three Parametrizations of Rotations
Three Parametrizations of Rotations
Aaron T. Becker -
 Moving Two Particles with Shared Control Inputs Using Wall Friction
Moving Two Particles with Shared Control Inputs Using Wall Friction
Aaron T. Becker -
 Compression Ratio of Spheres in a Curved Tube
Compression Ratio of Spheres in a Curved Tube
Aaron T. Becker -
 Common Robot Arm Configurations
Common Robot Arm Configurations
Aaron T. Becker -
Distribution of a Robot Swarm in a Square under Gravity
Aaron T. Becker -
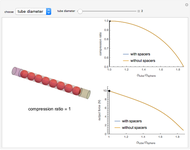 Transmitting Force through a Tube Filled with Spheres and Spacers
Transmitting Force through a Tube Filled with Spheres and Spacers
Aaron T. Becker -
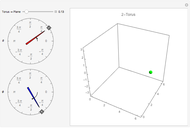 Chart for a Torus
Chart for a Torus
Aaron T. Becker -
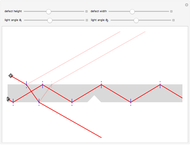 Defects in an Optical Fiber
Defects in an Optical Fiber
Aaron T. Becker -
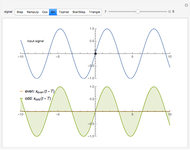 Synthesis with Even and Odd Functions
Synthesis with Even and Odd Functions
Aaron T. Becker