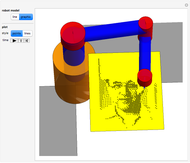
Trajectory Planning of Robot for Painting Art



Requires a Wolfram Notebook System
Interact on desktop, mobile and cloud with the free Wolfram Player or other Wolfram Language products.
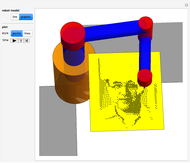
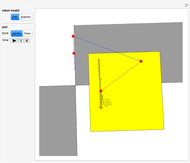
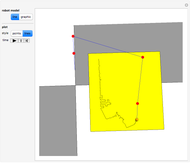
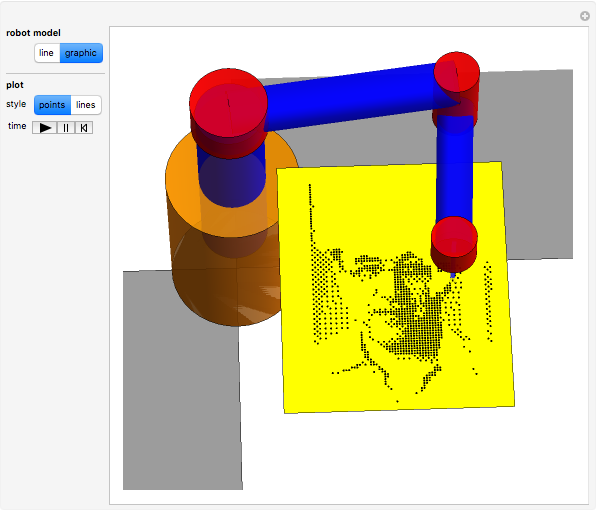
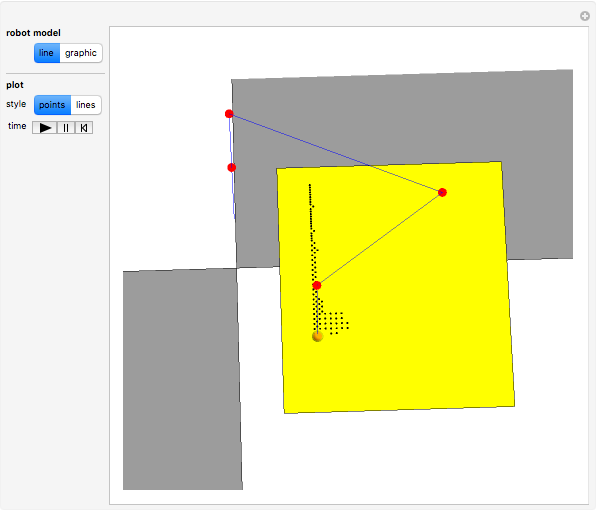
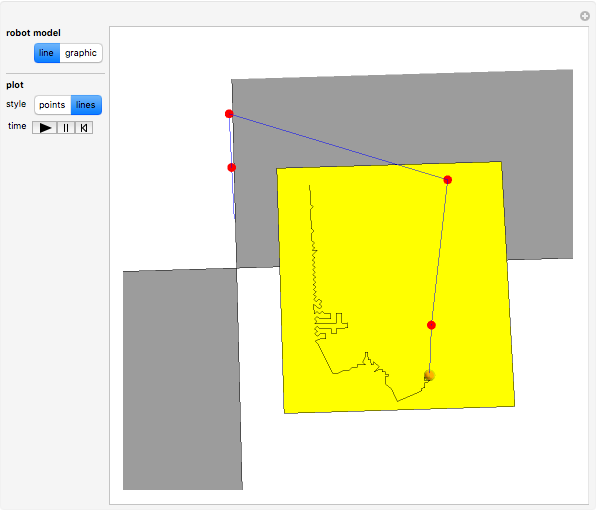
Most industrial robots are designed for work like milling, welding, transportation, and painting. Other robots are designed for art, research, or education. The e-David robot (developed at the University of Konstanz) has the capability of producing artistic drawings.
[more]
Contributed by: Frederick Wu (June 2016)
Open content licensed under CC BY-NC-SA
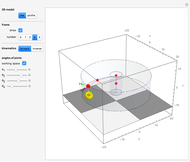
Snapshots
Details
Reference
[1] Wikipedia. "eDavid (Robot)." (Jun 17, 2016) en.wikipedia.org/wiki/EDavid_(robot).
Permanent Citation
"Trajectory Planning of Robot for Painting Art"
http://demonstrations.wolfram.com/TrajectoryPlanningOfRobotForPaintingArt/
Wolfram Demonstrations Project
Published: June 20 2016
 Forward and Inverse Kinematics of the SCARA Robot
Forward and Inverse Kinematics of the SCARA Robot
Frederick Wu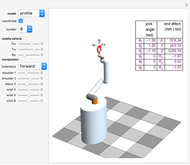 Mobile Robot with Single Manipulator
Mobile Robot with Single Manipulator
Frederick Wu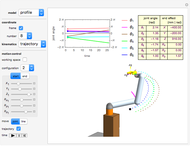 Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu Kinematics of Biped Legs for Humanoid Robots
Kinematics of Biped Legs for Humanoid Robots
Frederick Wu Forward Kinematics of Humanoid Robots
Forward Kinematics of Humanoid Robots
Frederick Wu Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu Breadth-First Search Robot Motion Planning
Breadth-First Search Robot Motion Planning
Aaron T. Becker, Benedict Isichei and Praveen Reddy Padala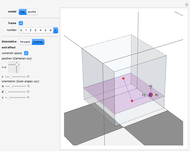 Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu Denavit-Hartenberg Parameters for a Three-Link Robot
Denavit-Hartenberg Parameters for a Three-Link Robot
Aaron T. Becker and Mary Burbage Robot Manipulator Workspaces
Robot Manipulator Workspaces
Aaron T. Becker, Benedict Isichei, Muhammad Sultan and Maruthi S. Chemudupati
-
 Buying Watermelons Intelligently
Buying Watermelons Intelligently
Frederick Wu -
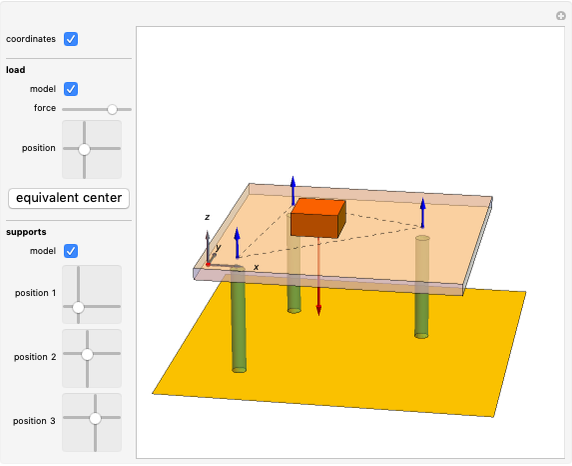 Static Equilibrium for a Plate with Support at Three Points
Static Equilibrium for a Plate with Support at Three Points
Frederick Wu -
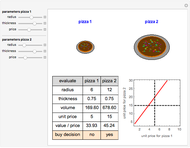 Evaluate Hot Pizza
Evaluate Hot Pizza
Frederick Wu -
 Rubik's Snake Puzzle
Rubik's Snake Puzzle
Frederick Wu -
Mobile Robot with Single Manipulator
Frederick Wu -
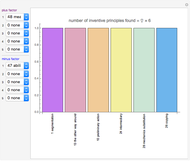 Multiple Input Parameters for TRIZ Matrix Application
Multiple Input Parameters for TRIZ Matrix Application
Frederick Wu -
Joint Space and Tooling Space for Robot Motion Control
Frederick Wu -
 Trajectory Planning of Robot for Painting Art
Trajectory Planning of Robot for Painting Art
Frederick Wu -
Inverse Kinematics for a Robot Manipulator with Six Degrees of Freedom
Frederick Wu -
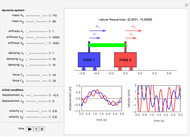 Spring-Mass-Damping System with Two Degrees of Freedom
Spring-Mass-Damping System with Two Degrees of Freedom
Frederick Wu -
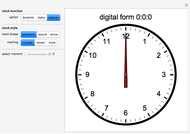 When Do the Three Hands of an Analog Clock Overlap?
When Do the Three Hands of an Analog Clock Overlap?
Frederick Wu -
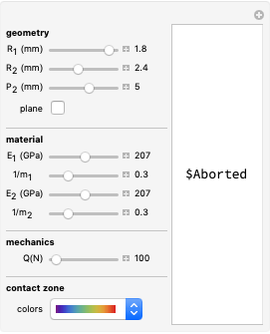 Hertzian Contact Stress
Hertzian Contact Stress
Frederick Wu -
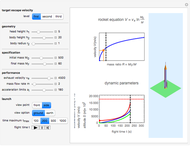 Launching a Rocket
Launching a Rocket
Frederick Wu -
Kinematics of Biped Legs for Humanoid Robots
Frederick Wu -
 Intersection of a Convex Polyhedron and a Plane
Intersection of a Convex Polyhedron and a Plane
Frederick Wu -
Kinematics of a Redundant Anthropomorphic Arm with Seven Degrees of Freedom
Frederick Wu -
Forward and Inverse Kinematics of the SCARA Robot
Frederick Wu -
Forward Kinematics of Humanoid Robots
Frederick Wu -
 Complex Addition of Harmonic Motions and the Phenomenon of Beats
Complex Addition of Harmonic Motions and the Phenomenon of Beats
Frederick Wu -
 Shortening the 29th Olympic Torch Tour
Shortening the 29th Olympic Torch Tour
Frederick Wu